
如需转载,请根据 知识共享署名-非商业性使用-相同方式共享 4.0 国际许可协议 许可,附上本文作者及链接。
本文作者: Alice
作者昵称: 沉。
本文链接: http://example.com/2020/11/05/%E6%93%8D%E4%BD%9C%E7%B3%BB%E7%BB%9F%EF%BC%88%E4%B8%89%EF%BC%89/
四、文件管理
4.1、文件的基本概念
文件名:由创建文件的用户决定文件名,主要是为了方便用户找到文件,同一目录下不允许有重名文件。
标识符:一个系统内的各文件标识符唯一,对用户来说毫无可读性,因此标识符只是操作系统用于区分各个文件的一种内部名称。
类型:指明文件的类型
位置:文件存放的路径(让用户使用)、在外存中的地址(操作系统使用,对用户不可见)
大小:指明文件大小创建时间、上次修改时间文件所有者信息
保护信息:对文件进行保护的访问控制信息
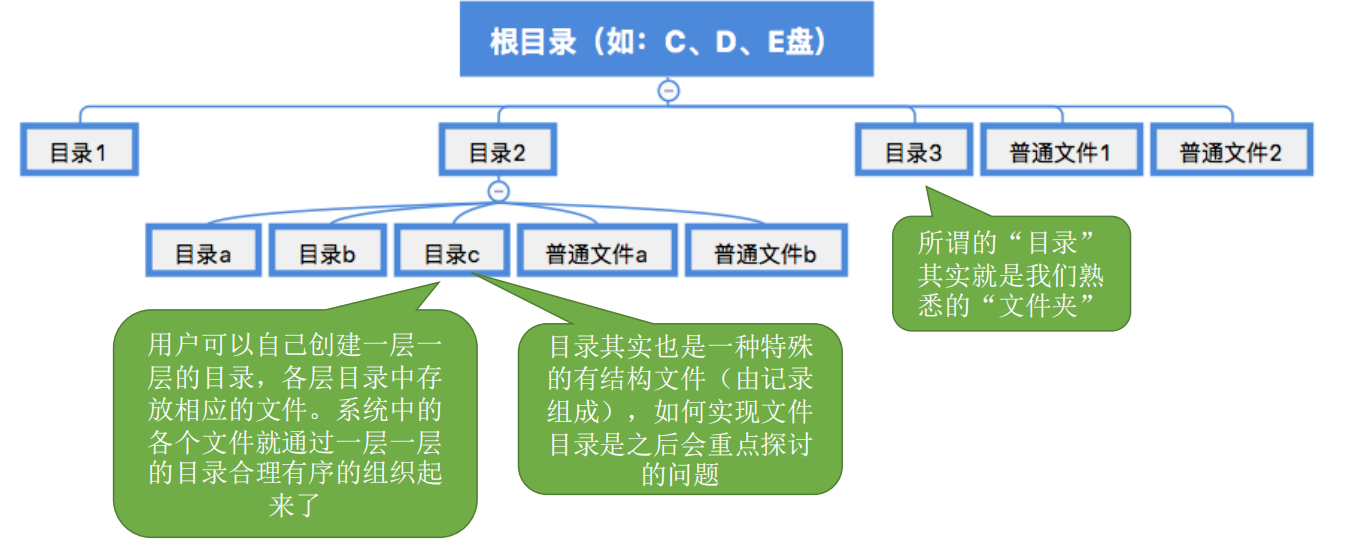
文件之间是如何组织起来的:
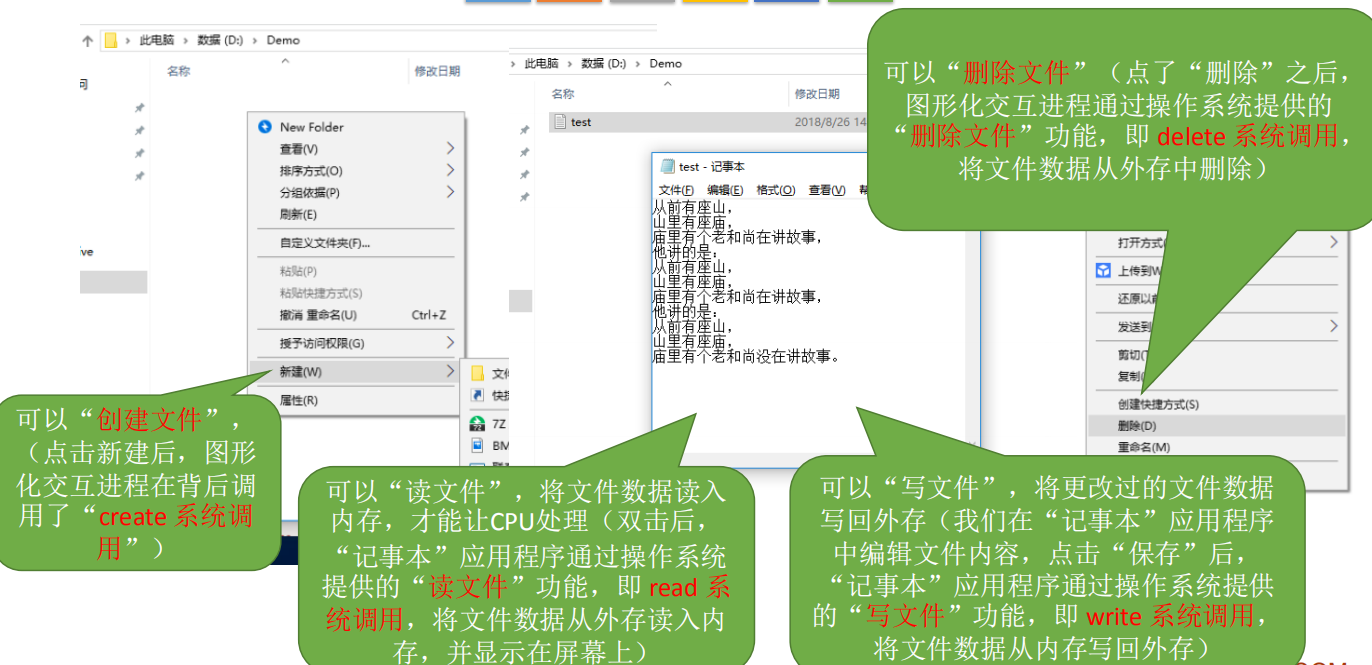
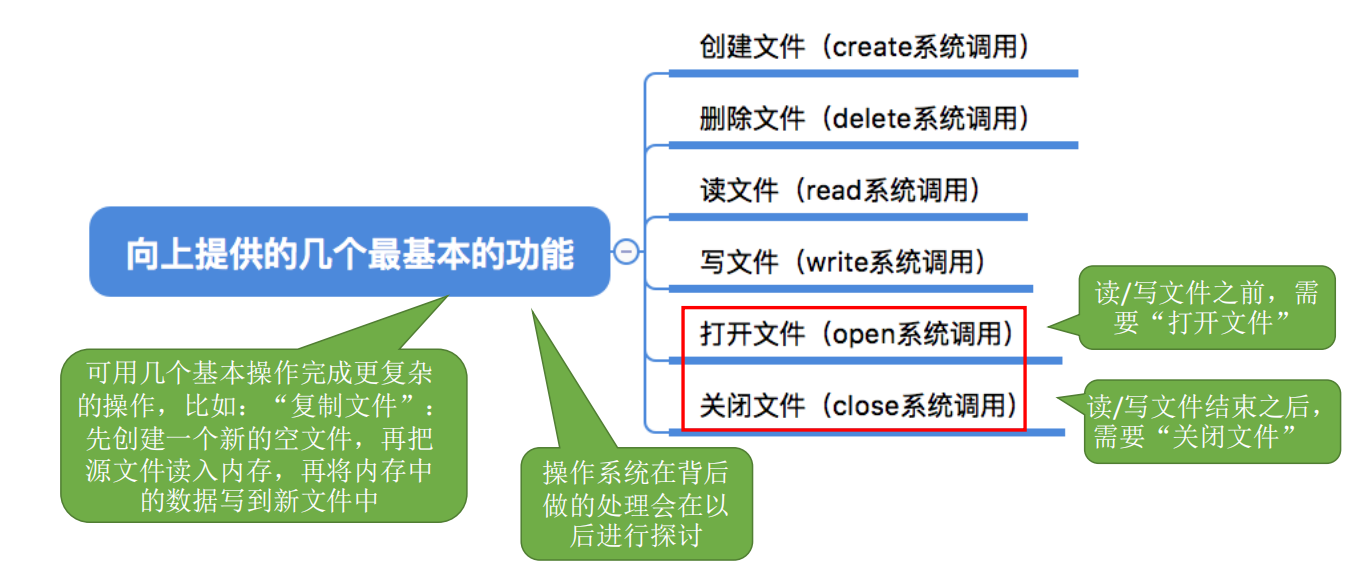
操作系统向上提供了哪些功能?
文件共享:使多个用户可以共享使用一个文件
文件保护:如何保证不同的用户对文件有不同的操作权限
小结:
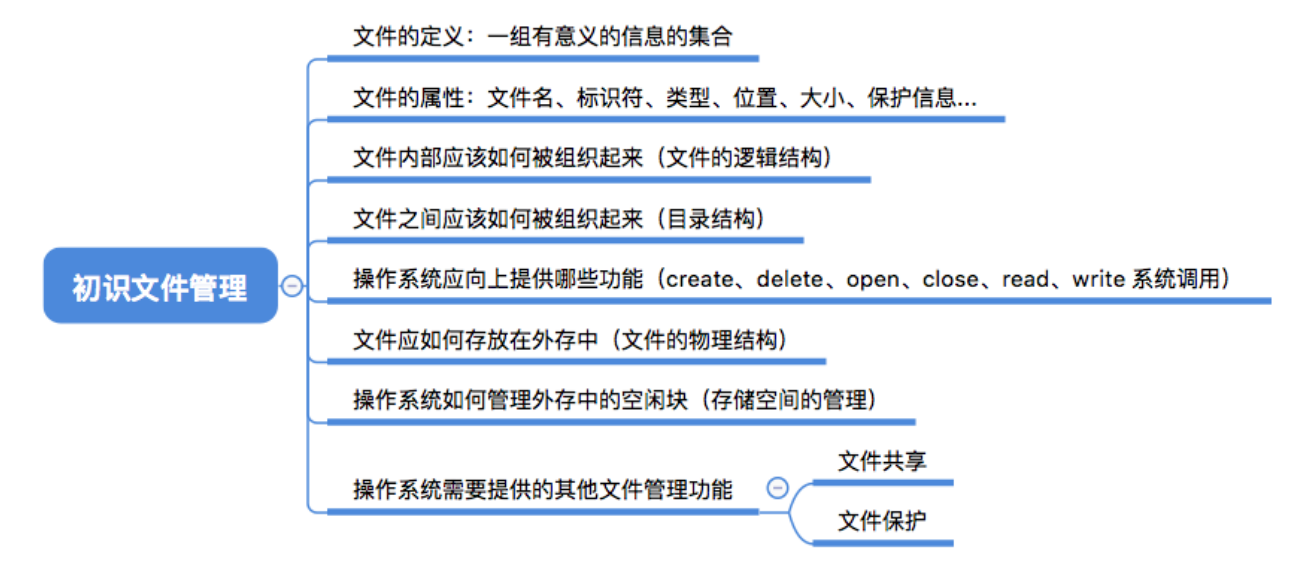
4.2、文件的逻辑结构
所谓的“逻辑结构”,就是指在用户看来,文件内部的数据应该是如何组织起来的。而“物理结构”指的是在操作系统看来,文件的数据是如何存放在外存中的。
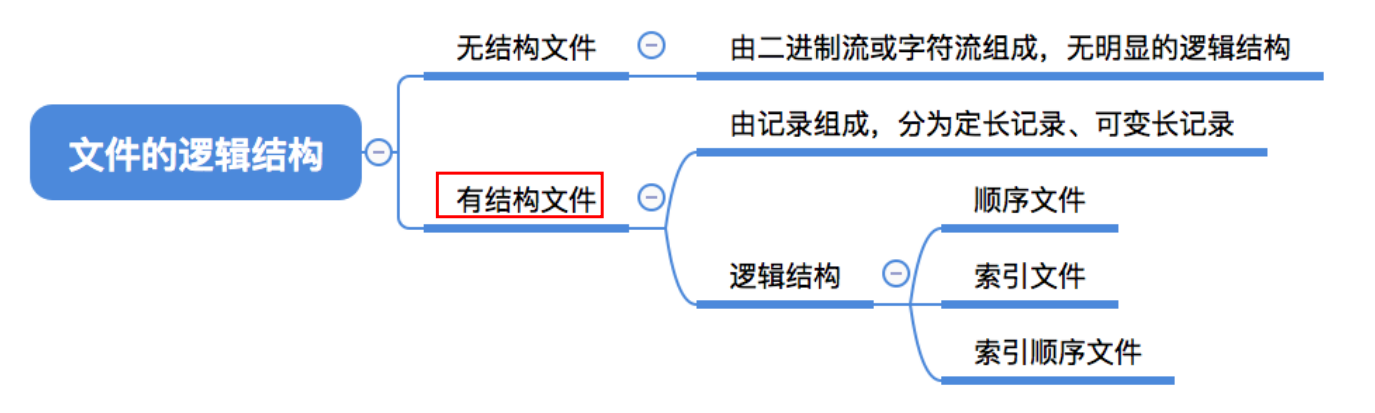
按文件是否有结构分类,可以分为无结构文件、有结构文件两种。
无结构文件:文件内部的数据就是一系列二进制流或字符流组成。又称“流式文件”。如:Windows 操作系统中的 .txt 文件。
文件内部的数据其实就是一系列字符流,没有明显的结构特性。因此也不用探讨无结构文件的“逻辑结构”问题。
有结构文件:由一组相似的记录组成,又称“记录式文件”。每条记录又若干个数据项组成。如:数据库表文件。一般来说,每条记录有一个数据项可作为关键字(作为识别不同记录的ID),根据各条记录的长度(占用的存储空间)是否相等,又可分为定长记录和可变长记录两种
顺序文件:顺序文件:文件中的记录一个接一个地顺序排列(逻辑上),记录可以是定长的或可变长的。各个记录在物理上可以顺序存储或链式存储。
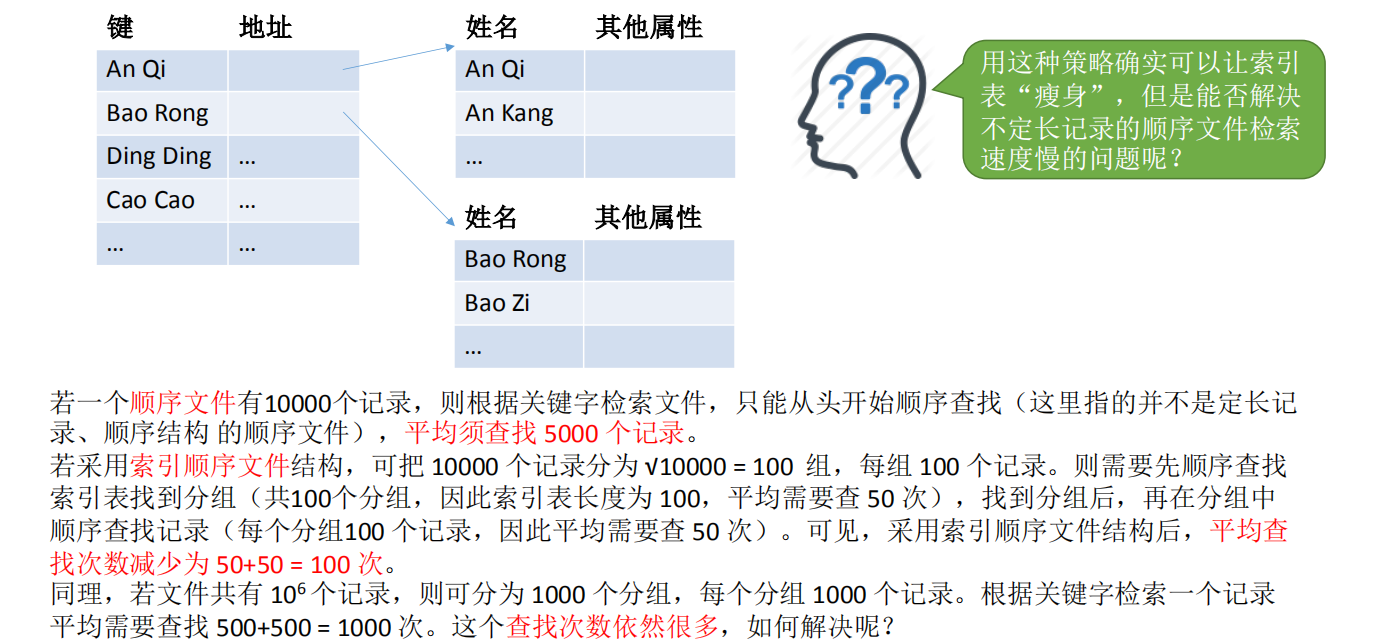
索引表本身是定长记录的顺序文件。因此可以快速找到第 i 个记录对应的索引项。可将关键字作为索引号内容,若按关键字顺序排列,则还可以支持按照关键字折半查找。每当要增加/删除一个记录时,需要对索引表进行修改。由于索引文件有很快的检索速度,因此主要用于对信息处理的及时性要求比较高的场合。
另外,可以用不同的数据项建立多个索引表。
索引顺序文件:
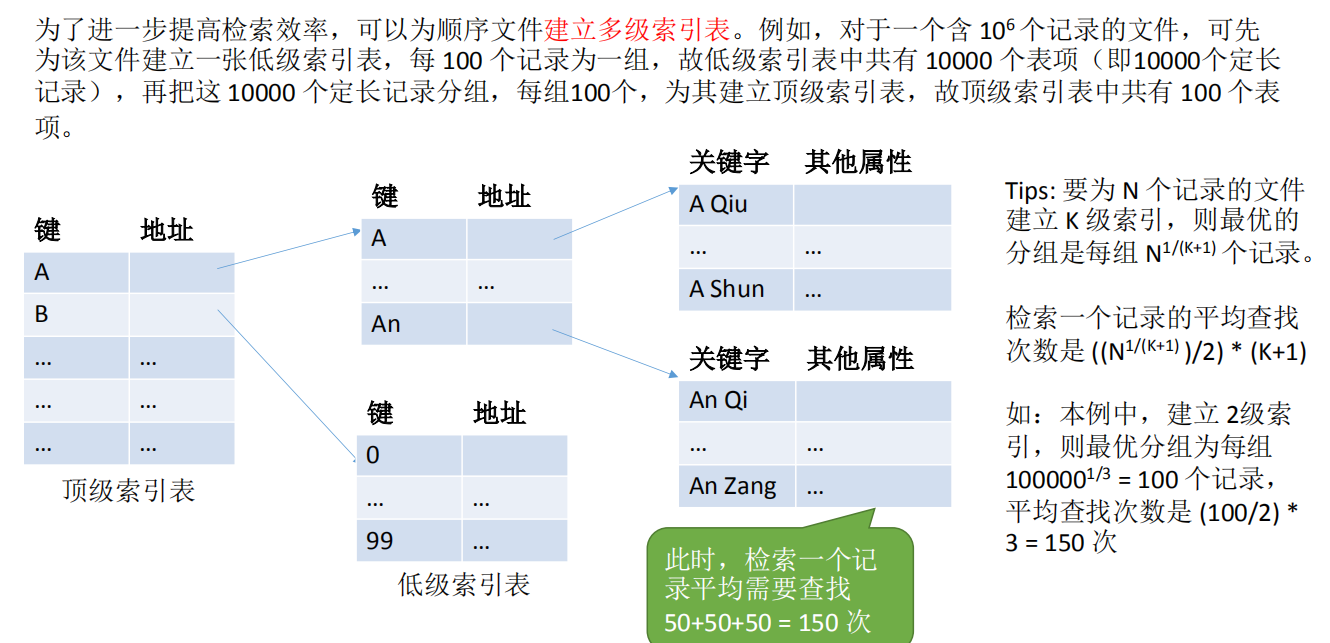
多级索引顺序文件:
小结:
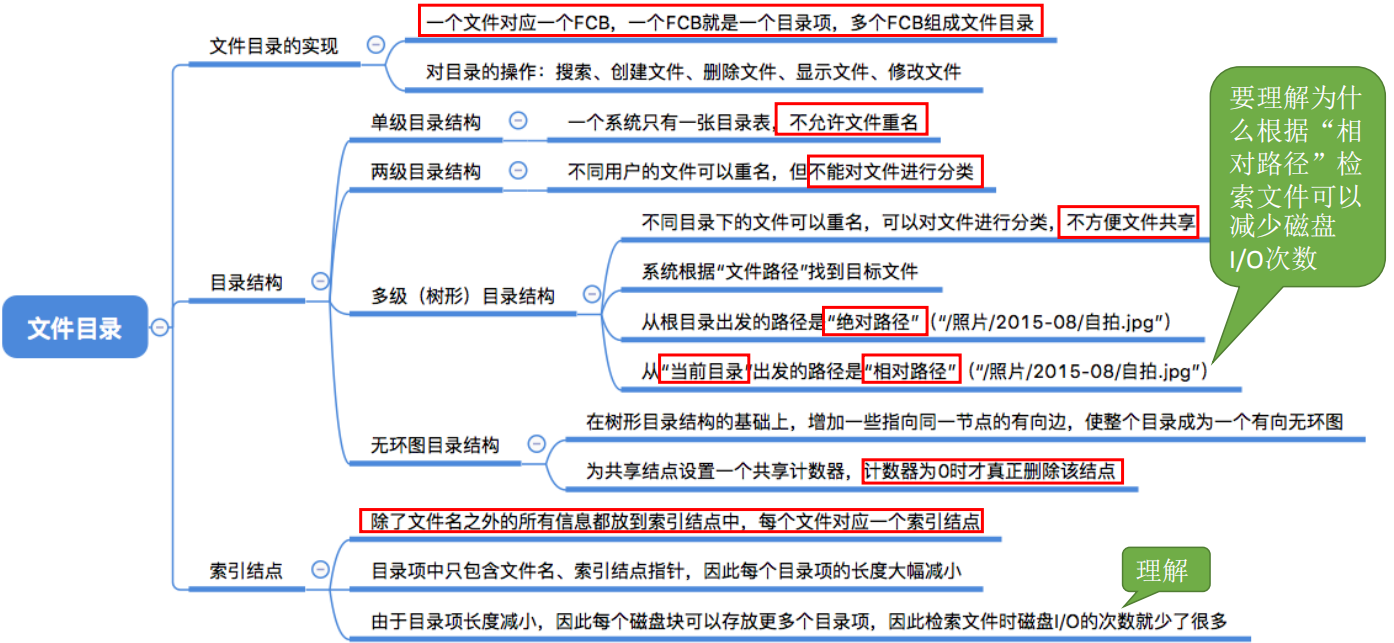
4.3、文件目录
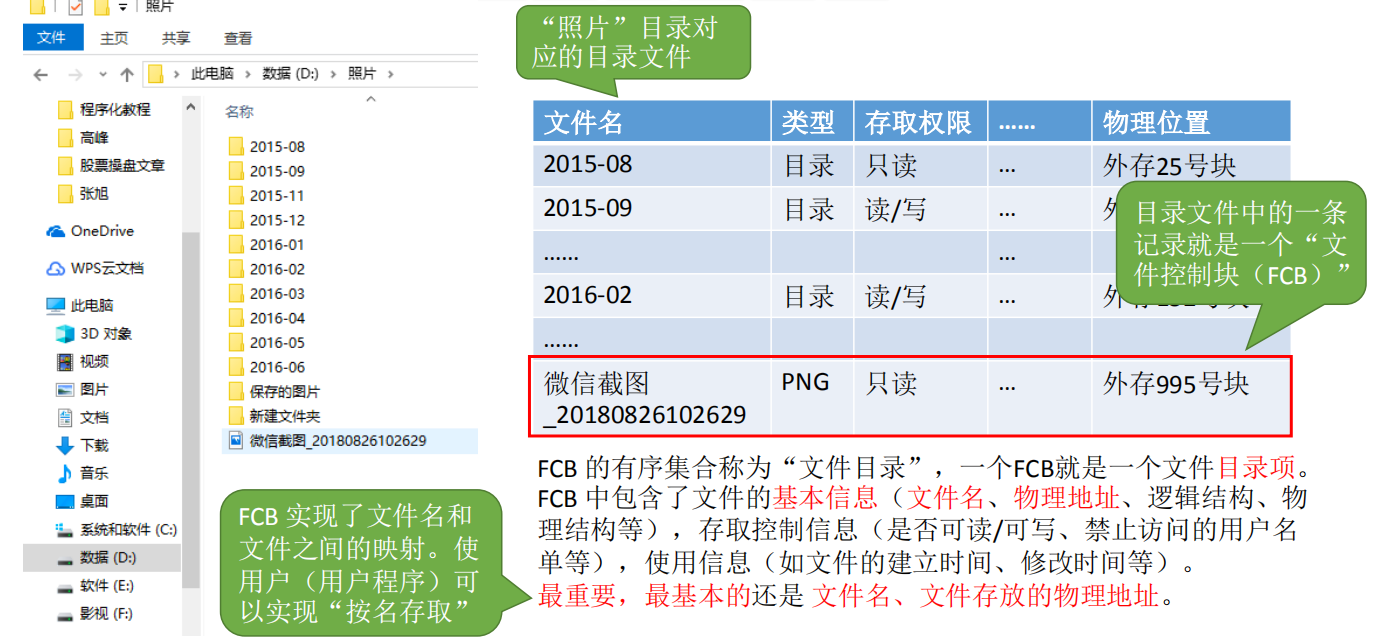
4.3.1、文件控制块
需要对目录进行哪些操作?
搜索:当用户要使用一个文件时,系统要根据文件名搜索目录,找到该文件对应的目录项
创建文件:创建一个新文件时,需要在其所属的目录中增加一个目录项
删除文件:当删除一个文件时,需要在目录中删除相应的目录项
显示目录:用户可以请求显示目录的内容,如显示该目录中的所有文件及相应属性
修改目录:某些文件属性保存在目录中,因此这些属性变化时需要修改相应的目录项(如:文件重命名)
4.3.2、目录结构
早期操作系统并不支持多级目录,整个系统中只建立一张目录表,每个文件占一个目录项。
单级目录实现了“按名存取”,但是不允许文件重名。在创建一个文件时,需要先检查目录表中有没有重名文件,确定不重名后才能允许建立文件,并将新文件对应的目录项插入目录表中。显然,单级目录结构不适用于多用户操作系统。
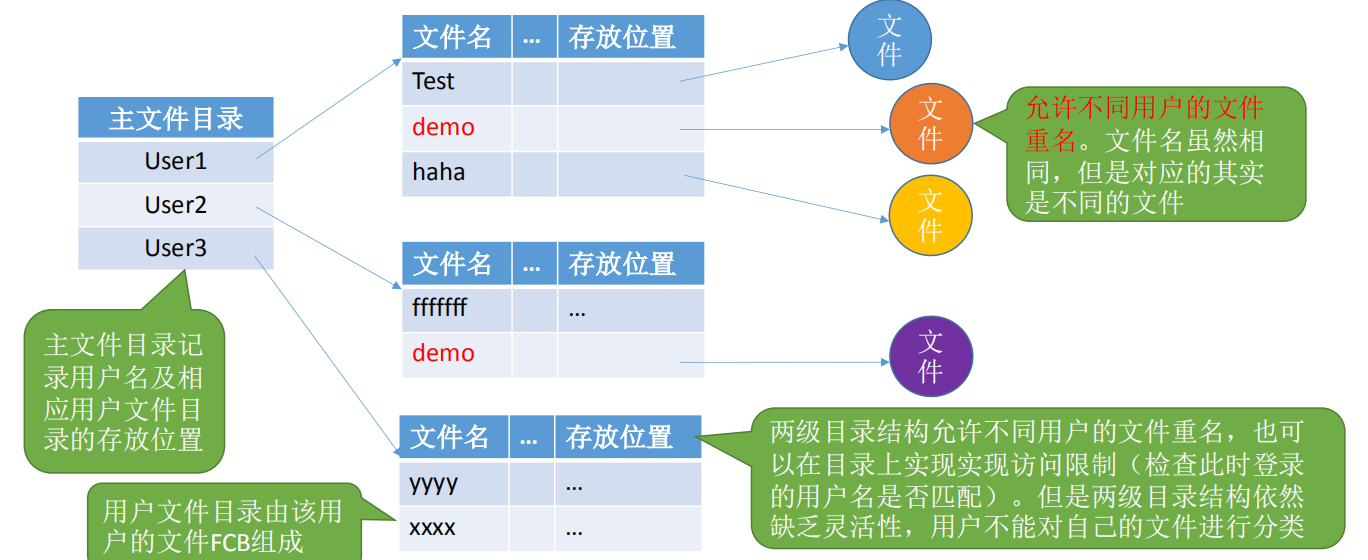
两极目录结构
早期的多用户操作系统,采用两级目录结构。分为主文件目录(MFD,Master File Directory)和用户文件目录(UFD,User Flie Directory)。
多级目录结构
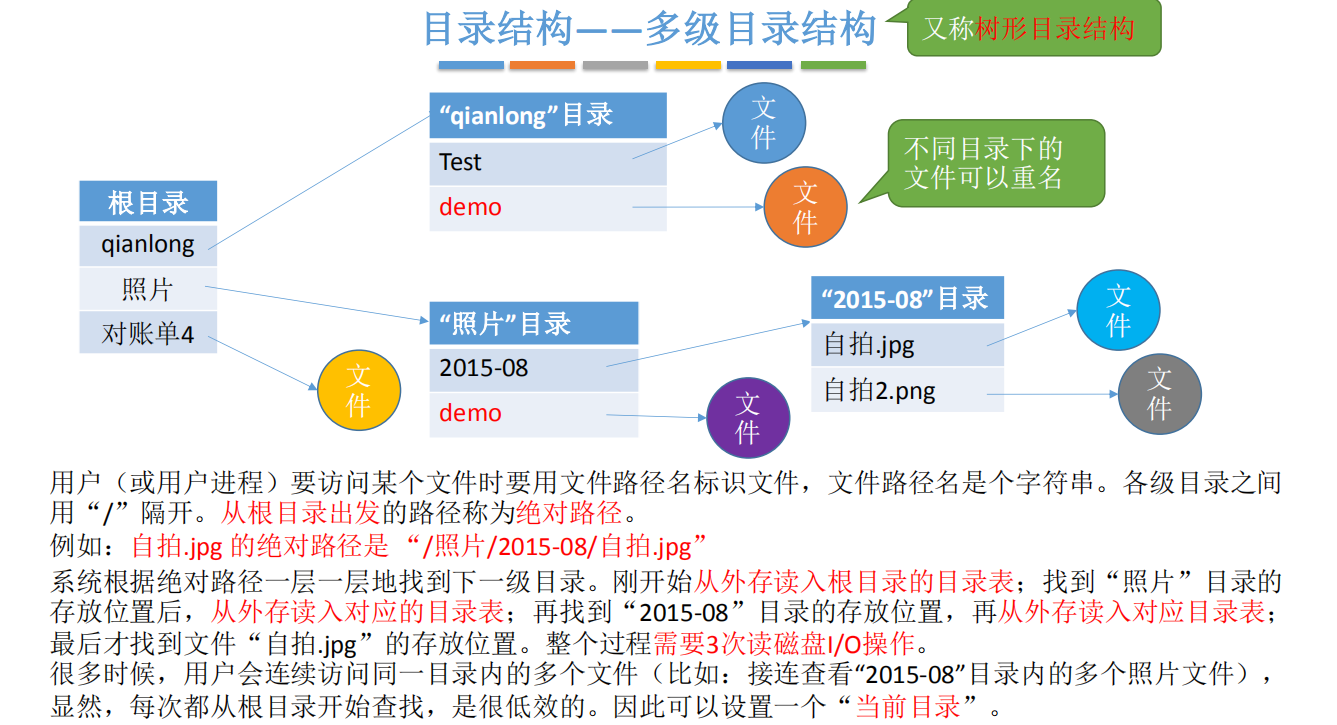
树形目录结构可以很方便地对文件进行分类,层次结构清晰,也能够更有效地进行文件的管理和保护。但是,树形结构不便于实现文件的共享。为此,提出了“无环图目录结构”。
无环图目录结构:
可以用不同的文件名指向同一个文件,甚至可以指向同一个目录(共享同一目录下的所有内容)。
需要为每个共享结点设置一个共享计数器,用于记录此时有多少个地方在共享该结点。用户提出删除结点的请求时,只是删除该用户的FCB、并使共享计数器减1,并不会直接删除共享结点。
只有共享计数器减为0时,才删除结点。
注意:共享文件不同于复制文件。在共享文件中,由于各用户指向的是同一个文件,因此只要其中一个用户修改了文件数据,那么所有用户都可以看到文件数据的变化。
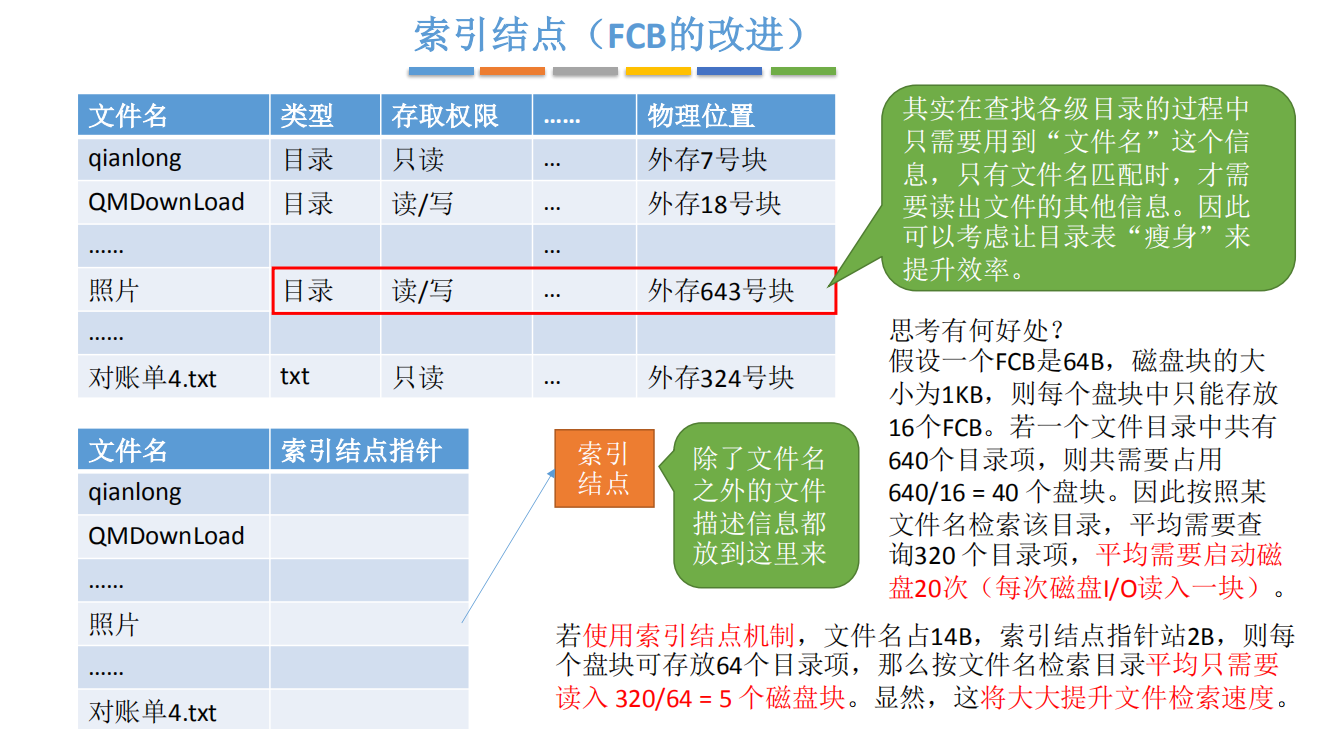
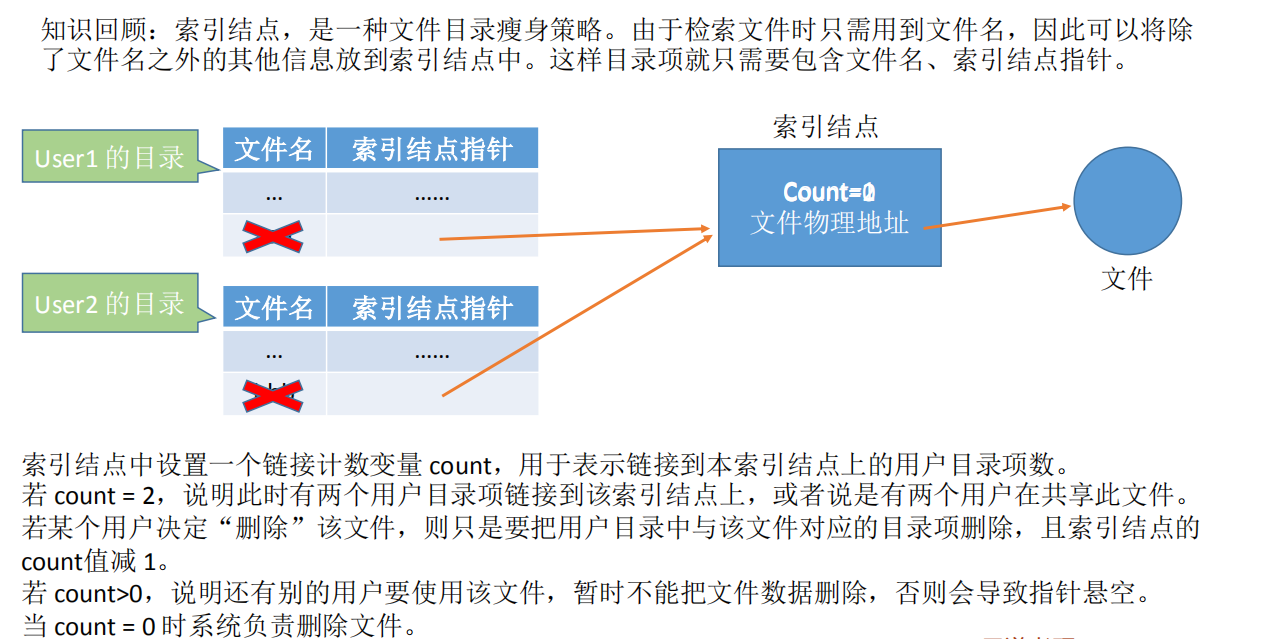
索引结点(FCB的改进)
存放在外存中的索引结点称为“磁盘索引结点”,当索引结点放入内存后称为“内存索引结点”。
相比之下内存索引结点中需要增加一些信息,比如:文件是否被修改、此时有几个进程正在访问该文件等
小结:
4.4、文件的物理结构
类似于内存分页,磁盘中的存储单元也会被分为一个个“块/磁盘块/物理块”。很多操作系统中,磁盘块的大小与内存块、页面的大小相同
在内存管理中,进程的逻辑地址空间被分为一个一个页面同样的,在外存管理中,为了方便对文件数据的管理,文件的逻辑地址空间也被分为了一个一个的文件“块”。于是文件的逻辑地址也可以表示为(逻辑块号,块内地址)的形式。
4.4.1、连续分配
连续分配方式要求每个文件在磁盘上占有一组连续的块
(逻辑块号,块内地址)——>(物理块号,块内地址)。只需转换块号就行,块内地址保持不变
物理块号 = 起始块号 + 逻辑块号
可以直接算出逻辑块号对应的物理块号,因此连续分配支持顺序访问和直接访问(即随机访问)
读取某个磁盘块时,需要移动磁头。访问的两个磁盘块相隔越远,移动磁头所需时间就越长。
结论:连续分配的文件在顺序读/写时速度最快
连续分配的缺点: 物理上采用连续分配的文件不方便拓展。物理上采用连续分配,存储空间利用率低,会产生难以利用的磁盘碎片可以用紧凑来处理碎片,但是需要耗费很大的时间代价。
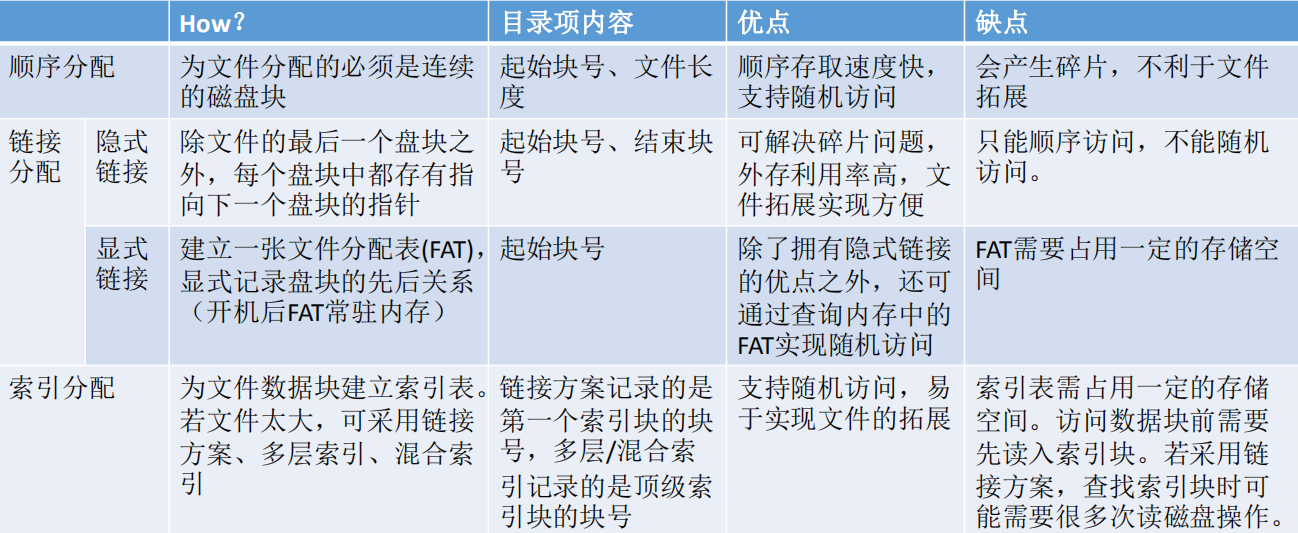
连续分配总结:
连续分配方式要求每个文件在磁盘上占有一组连续的块。
优点:支持顺序访问和直接访问(即随机访问);连续分配的文件在顺序访问时速度最快
缺点:不方便文件拓展;存储空间利用率低,会产生磁盘碎片
4.4.2、链接分配
链接分配采取离散分配的方式,可以为文件分配离散的磁盘块。分为隐式链接和显式链接两种。
采用链式分配(隐式链接)方式的文件,只支持顺序访问,不支持随机访问,查找效率低。另外,指向下一个盘块的指针也需要耗费少量的存储空间。
采用隐式链接的链接分配方式,很方便文件拓展。 另外,所有的空闲磁盘块都可以被利用,不会有碎片问题,外存利用率高。
隐式链接总结:
链接分配采取离散分配的方式,可以为文件分配离散的磁盘块。分为隐式链接和显式链接两种。
隐式链接——除文件的最后一个盘块之外,每个盘块中都存有指向下一个盘块的指针。文件目录包括文件第一块的指针和最后一块的指针。
优点:很方便文件拓展,不会有碎片问题,外存利用率高。
缺点:只支持顺序访问,不支持随机访问,查找效率低,指向下一个盘块的指针也需要耗费少量的存储空间
显示链接:
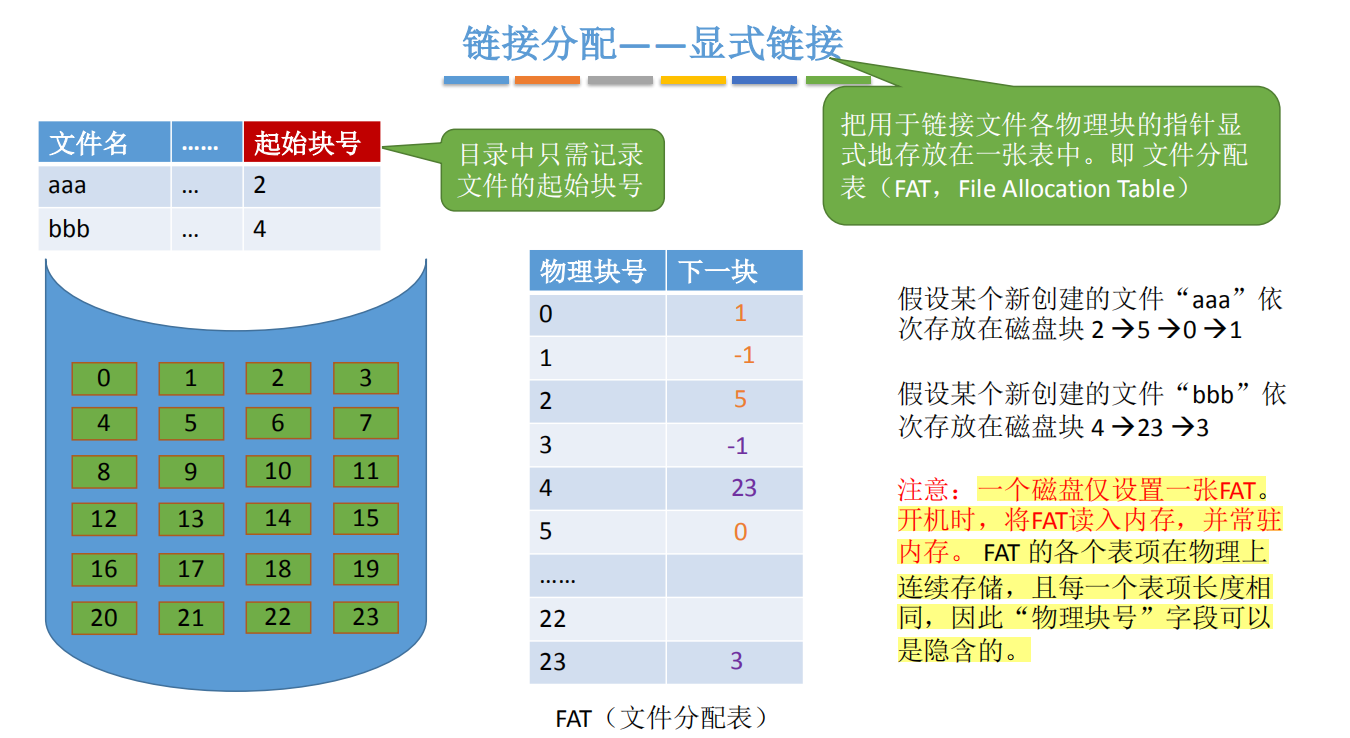
采用链式分配(显式链接)方式的文件,支持顺序访问,也支持随机访问(想访问 i 号逻辑块时,并不需要依次访问之前的 0 ~ i-1号逻辑块),由于块号转换的过程不需要访问磁盘,因此相比于隐式链接来说,访问速度快很多。
显然,显式链接也不会产生外部碎片,也可以很方便地对文件进行拓展。
显示链接总结:
显式链接——把用于链接文件各物理块的指针显式地存放在一张表中,即 文件分配表(FAT,FileAllocation Table)。一个磁盘只会建立一张文件分配表。开机时文件分配表放入内存,并常驻内 存。
优点:很方便文件拓展,不会有碎片问题,外存利用率高,并且支持随机访问。相比于隐式链接 来说,地址转换时不需要访问磁盘,因此文件的访问效率更高。
缺点:文件分配表的需要占用一定的存储空间。
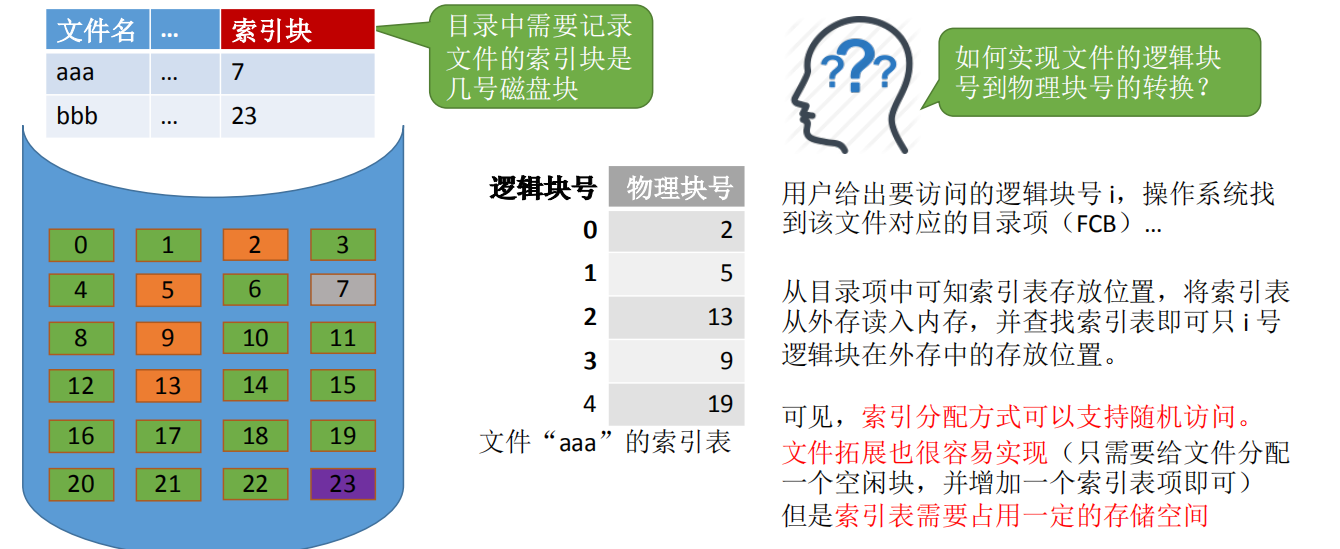
4.4.3、索引分配
索引分配允许文件离散地分配在各个磁盘块中,系统会为每个文件建立一张索引表,索引表中记录了文件的各个逻辑块对应的物理块(索引表的功能类似于内存管理中的页表——建立逻辑页面到物理页之间的映射关系)。索引表存放的磁盘块称为索引块。文件数据存放的磁盘块称为数据块。
①链接方案:如果索引表太大,一个索引块装不下,那么可以将多个索引块链接起来存放。
②多层索引:建立多层索引(原理类似于多级页表)。使第一层索引块指向第二层的索引块。还可根据文件大小的要求再建立第三层、第四层索引块。
- 采用 K 层索引结构,且顶级索引表未调入内存,则访问一个数据块只需要 K + 1 次读磁盘操作
③混合索引:多种索引分配方式的结合。例如,一个文件的顶级索引表中,既包含直接地址索引(直接指向数据块),又包含一级间接索引(指向单层索引表)、还包含两级间接索引(指向两层索引表) 。
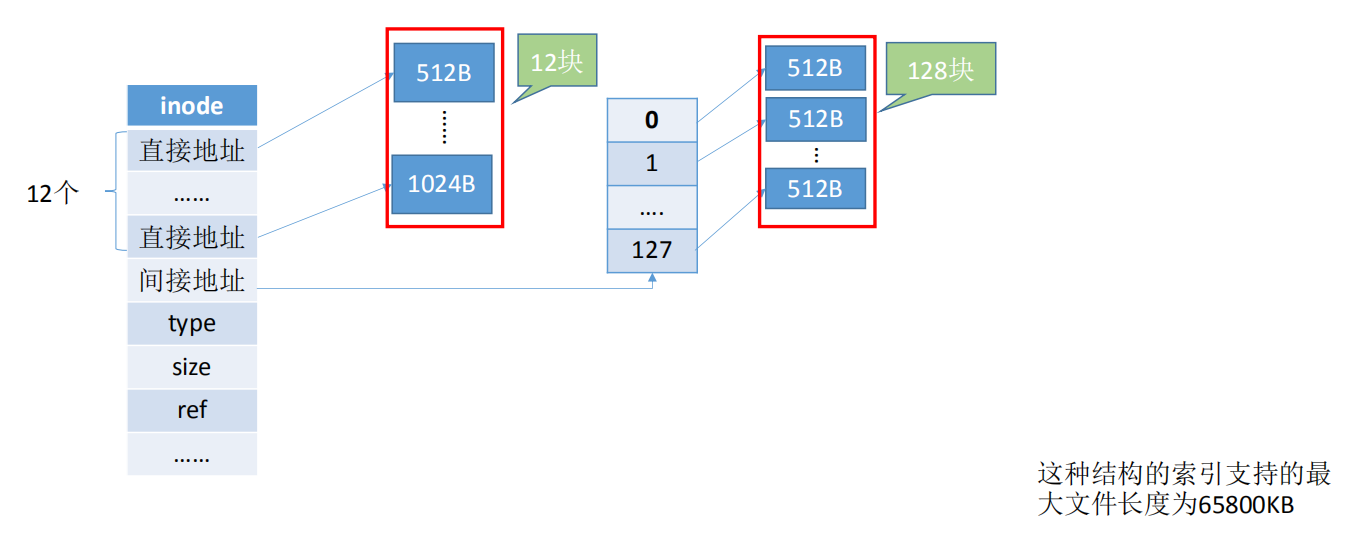
超级超级超级重要考点:①要会根据多层索引、混合索引的结构计算出文件的最大长度(Key:各级索引表最大不能超过一个块);②要能自己分析访问某个数据块所需要的读磁盘次数(Key:FCB中会存有指向顶级索引块的指针,因此可以根据FCB读入顶级索引块。每次读入下一级的索引块都需要一次读磁盘操作。另外,要注意题目条件——顶级索引块是否已调入内存)
总结:
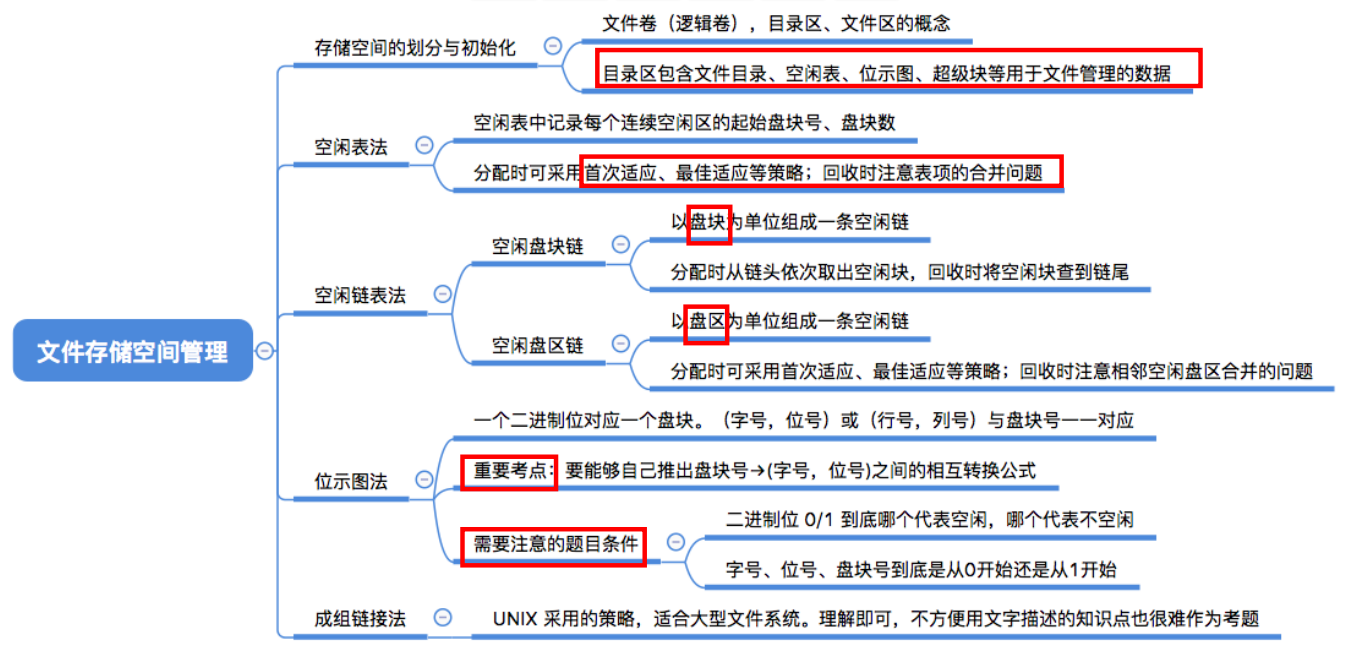
4.5、文件存储空间管理
存储空间管理——空闲表法
适用于 “连续分配方式”
如何分配磁盘块:与内存管理中的动态分区分配很类似,为一个文件分配连续的存储空间。同样可采用首次适应、最佳适应、最坏适应等算法来决定要为文件分配哪个区间。
如何回收磁盘块:与内存管理中的动态分区分配很类似,当回收某个存储区时需要有四种情况——①回收区的前后都没有相邻空闲区;②回收区的前后都是空闲区;③回收区前面是空闲区;④回收区后面是空闲区。总之,回收时需要注意表项的合并问题。
存储空间管理——空闲链表法

空闲盘块链:
操作系统保存着链头、链尾指针。
如何分配:若某文件申请 K 个盘块,则从链头开始依次摘下 K 个盘块分配,并修改空闲链的链头指针。
如何回收:回收的盘块依次挂到链尾,并修改空闲链的链尾指针。(适用于离散分配的物理结构。为文件分配多个盘块时可能要重复多次操作)
空闲盘区链:
操作系统保存着链头、链尾指针。
如何分配:若某文件申请 K 个盘块,则可以采用首次适应、最佳适应等算法,从链头开始检索,按照算法规则找到一个大小符合要求的空闲盘区,分配给文件。若没有合适的连续空闲块,也可以将不同盘区的盘块同时分配给一个文件,注意分配后可能要修改相应的链指针、盘区大小等数据。
如何回收:若回收区和某个空闲盘区相邻,则需要将回收区合并到空闲盘区中。若回收区没有和任何空闲区相邻,将回收区作为单独的一个空闲盘区挂到链尾。
存储空间管理——位示图法
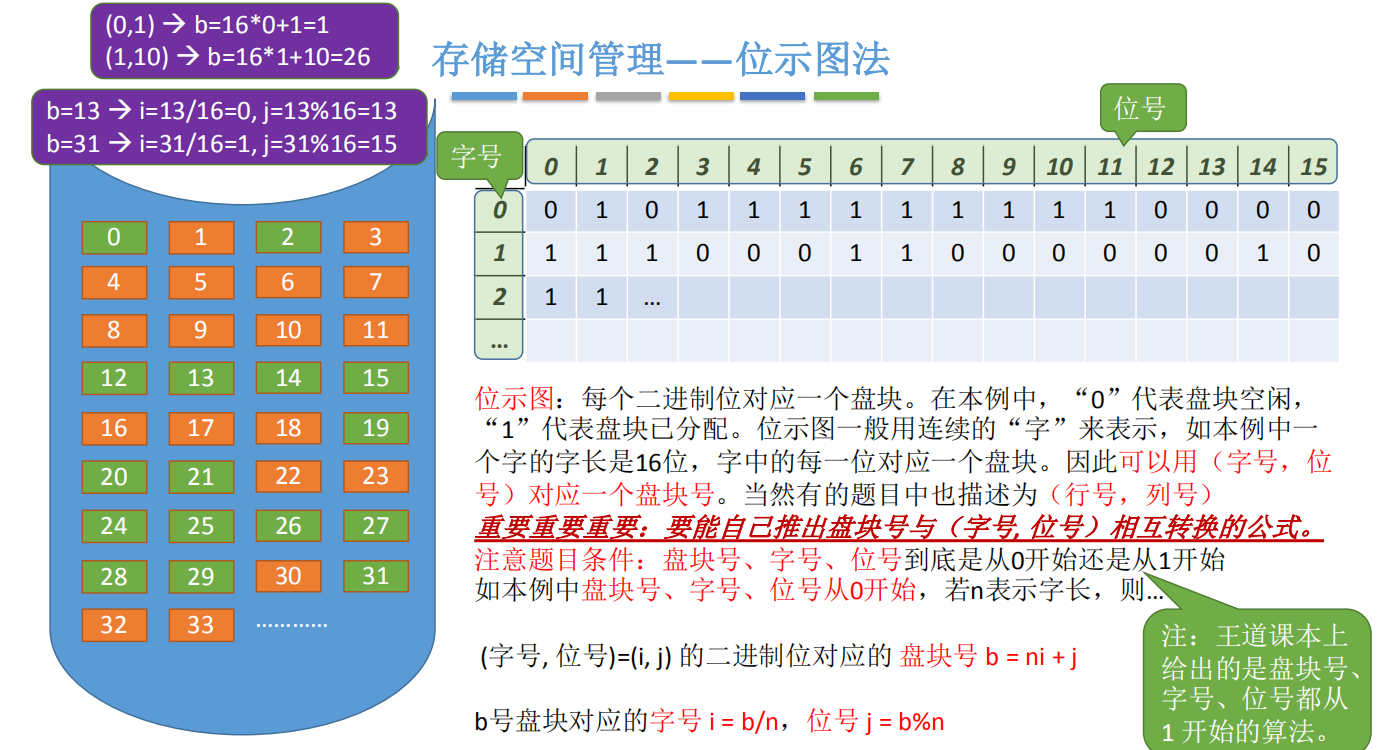
位示图:每个二进制位对应一个盘块。在本例中,“0”代表盘块空闲,“1”代表盘块已分配。
如何分配:若文件需要K个块,①顺序扫描位示图,找到K个相邻或不相邻的“0”;②根据字号、位号算出对应的盘块号,将相应盘块分配给文件;③将相应位设置为“1”。
如何回收:①根据回收的盘块号计算出对应的字号、位号;②将相应二进制位设为“0”
存储空间管理——成组链接法
空闲表法、空闲链表法不适用于大型文件系统,因为空闲表或空闲链表可能过大。UNIX系统中采用了成组链接法对磁盘空闲块进行管理。
文件卷的目录区中专门用一个磁盘块作为“超级块”,当系统启动时需要将超级块读入内存。并且要保证内存与外存中的“超级块”数据一致。
如何分配?Eg :需要100个空闲块①检查第一个分组的块数是否足够。100=100,是足够的。②分配第一个分组中的100个空闲块。但是由于300号块内存放了再下一组的信息,因此300号块的数据需要复制到超级块中。
如何回收?Eg :假设每个分组最多为100个空闲块,此时第一个分组已 有100个块,还要再回收一块。需要将超级块中的数据复制到新回收的块中,并修改超级块的内容,让新回收的块成为第一个分组。
总结:
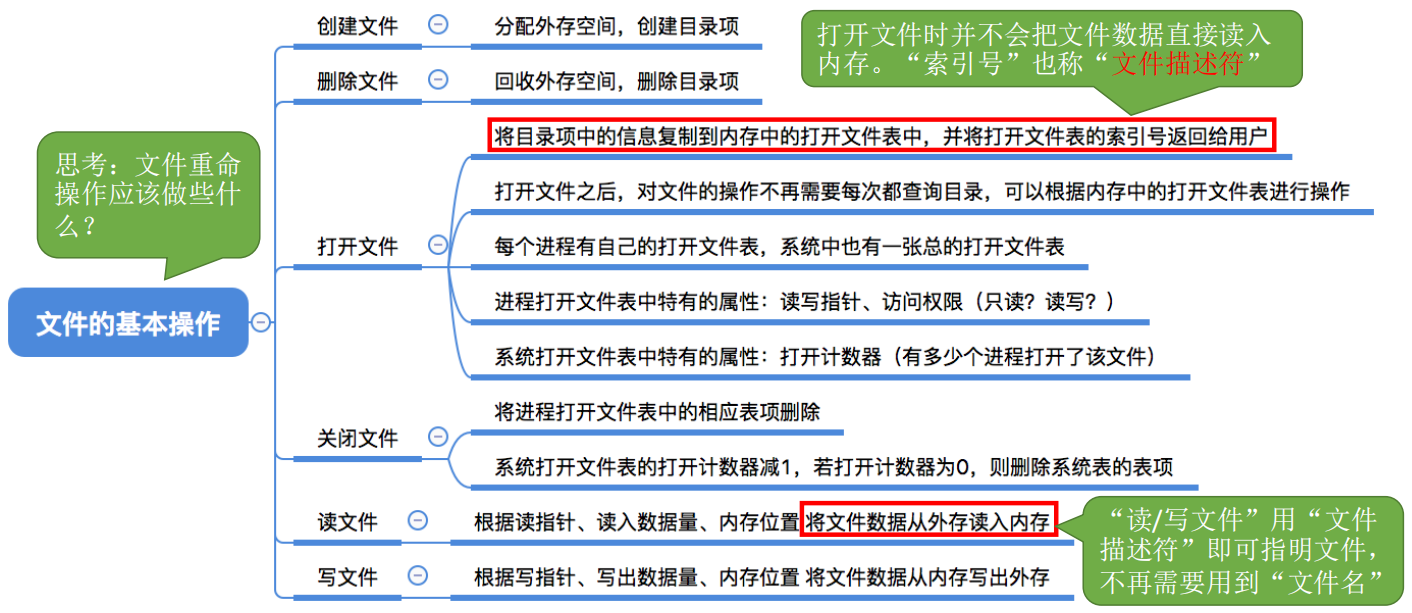
4.6、文件的基本操作
创建文件:进行 Create 系统调用时,需要提供的几个主要参数:
- 所需的外存空间大小(如:一个盘块,即1KB)
- 文件存放路径(“D:/Demo”)
- 文件名(这个地方默认为“新建文本文档.txt”)操作系统在处理 Create 系统调用时,主要做了两件事:
- 在外存中找到文件所需的空间(结合上小节学习的空闲链表法、位示图、成组链接法等管理策略,找到空闲空间)
- 根据文件存放路径的信息找到该目录对应的目录文件(此处就是 D:/Demo 目录),在目录中创建该文件对应的目录项。目录项中包含了文件名、文件在外存中的存放位置等信息。
删除文件:进行 Delete 系统调用时,需要提供的几个主要参数:
- 文件存放路径(“D:/Demo”)
- 文件名(“test.txt”)操作系统在处理 Delete 系统调用时,主要做了几件事:
- 根据文件存放路径找到相应的目录文件,从目录中找到文件名对应的目录项。
- 根据该目录项记录的文件在外存的存放位置、文件大小等信息,回收文件占用的磁盘块。(回收磁盘块时,根据空闲表法、空闲链表法、位图法等管理策略的不同,需要做不同的处理)
- 从目录表中删除文件对应的目录项
打开文件:在很多操作系统中,在对文件进行操作之前,要求用户先使用 open 系统调用“打开文件”,需要提供的几个主要参数:
- 文件存放路径(“D:/Demo”)
- 文件名(“test.txt”)
- 要对文件的操作类型(如:r 只读;rw 读写等)操作系统在处理 open 系统调用时,主要做了几件事:
- 根据文件存放路径找到相应的目录文件,从目录中找到文件名对应的的目录项,并检查该用户是否有指定的操作权限。
- 将目录项复制到内存中的“打开文件表”中。并将对应表目的编号返回给用户。之后用户使用打开文件表的编号来指明要操作的文件。
- 可以方便实现某些文件管理的功能。例如:在Windows系统中,我们尝试删除某个txt文件,如果此时该文件已被某个“记事本”进程打开,则系统会提示我们“暂时无法删除该文件”。其实系统在背后做的事就是先检查了系统打开文件表,确认此时是否有进程正在使用该文件。
关闭文件:进程使用完文件后,要“关闭文件”操作系统在处理 Close 系统调用时,主要做了几件事:
- 将进程的打开文件表相应表项删除
- 回收分配给该文件的内存空间等资源
- 系统打开文件表的打开计数器count 减1,若 count = 0,则删除对应表项。
读文件:进程使用 read系统调用完成写操作。需要指明是哪个文件(在支持“打开文件”操作的系统中,只需要提供文件在打开文件表中的索引号即可),还需要指明要读入多少数据(如:读入 1KB)、指明读入的数据要放在内存中的什么位置。操作系统在处理 read 系统调用时,会从读指针指向的外存中,将用户指定大小的数据读入用户指定的内存区域中。
写文件:进程使用 write 系统调用完成写操作,需要指明是哪个文件(在支持“打开文件”操作的系统中,只需要提供文件在打开文件表中的索引号即可),还需要指明要写出多少数据(如:写出 1KB)、写回外存的数据放在内存中的什么位置操作系统在处理 write 系统调用时,会从用户指定的内存区域中,将指定大小的数据写回写指针指向的外存。
小结:
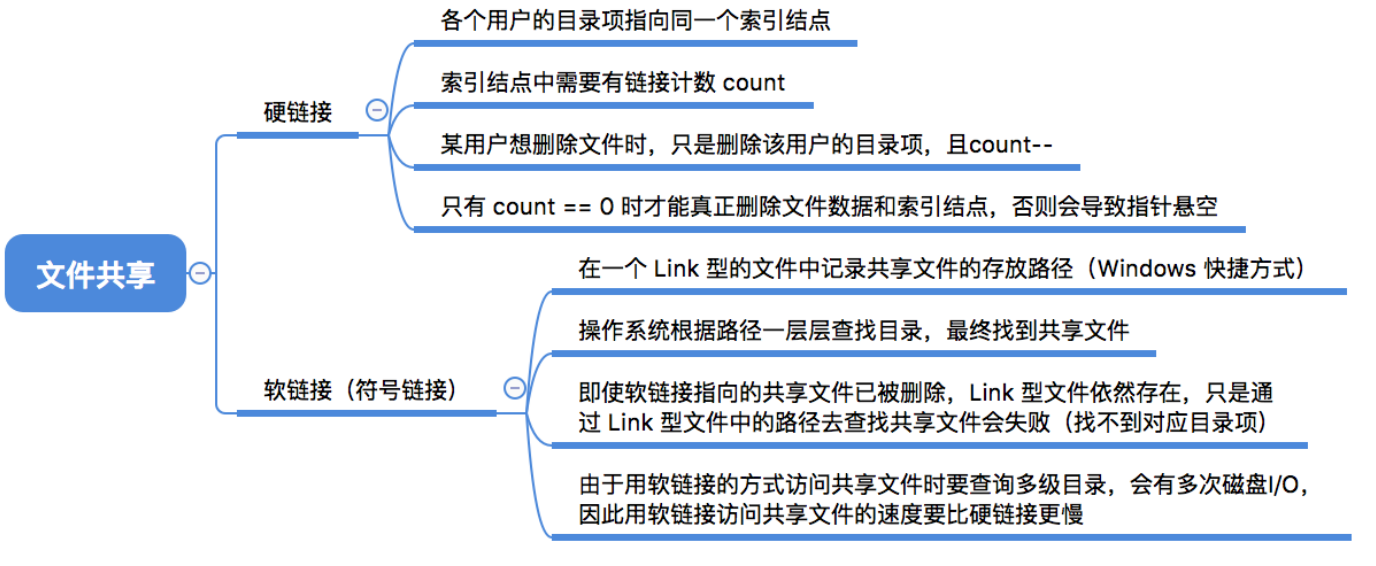
4.7、文件共享
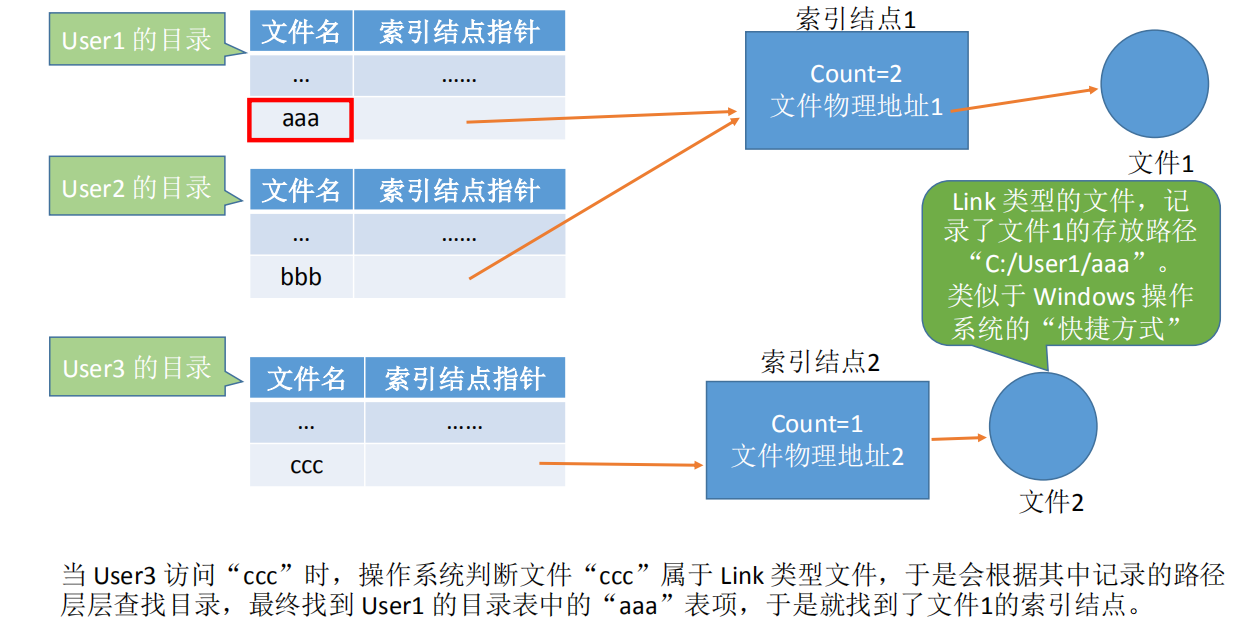
基于索引结点的共享方式(硬链接)
注意:多个用户共享同一个文件,意味着系统中只有“一份”文件数据。并且只要某个用户修改了该文件的数据,其他用户也可以看到文件数据的变化。如果是多个用户都“复制”了同一个文件,那么系统中会有“好几份”文件数据。其中一个用户修改了自己的那份文件数据,对其他用户的文件数据并没有影响。
基于符号链的共享方式(软连接)
小结:
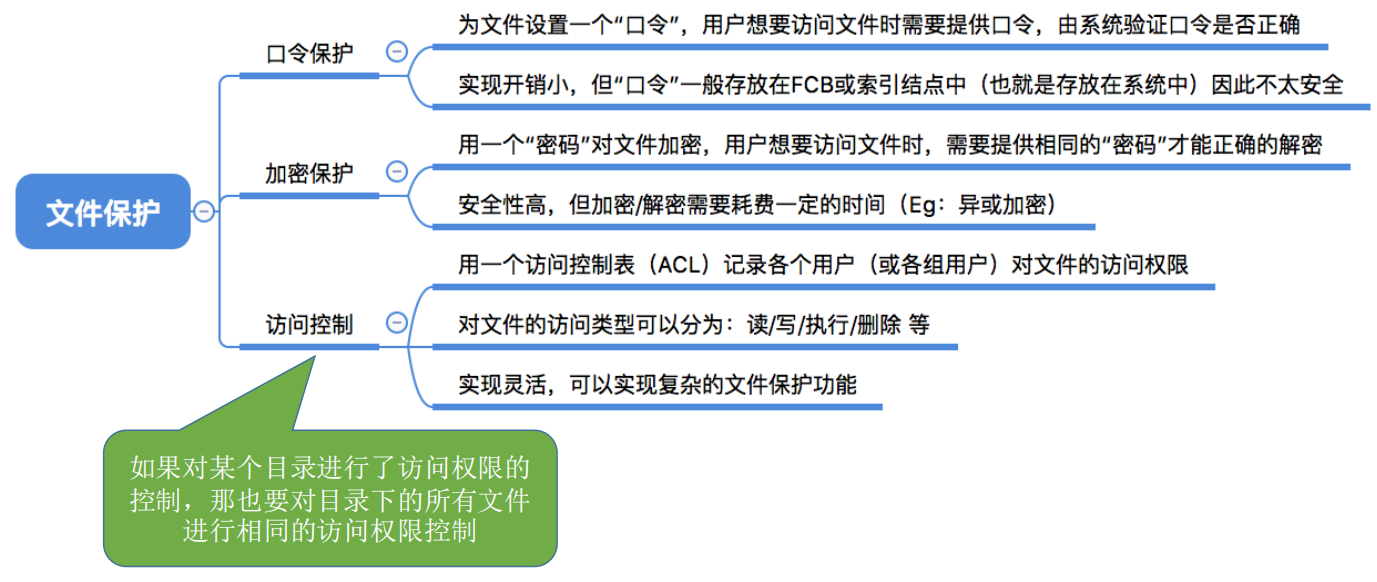
4.8、文件保护
口令保护:
- 口令一般存放在文件对应的 FCB 或索引结点中。用户访问文件前需要先输入“口令”,操作系统会将用户提供的口令与FCB中存储的口令进行对比如果正确,则允许该用户访问文件
- 优点:保存口令的空间开销不多,验证口令的时间开销也很小。
- 缺点:正确的“口令”存放在系统内部,不够安全。
加密保护:
- 使用某个“密码”对文件进行加密,在访问文件时需要提供正确的“密码”才能对文件进行正确的解密。
- 一个最简单的加密算法——异或加密假设用于加密/解密的“密码”为“01001”
- 优点:保密性强,不需要在系统中存储“密码”
- 缺点:编码/译码,或者说加密/解密要花费一定时间。
访问控制
- 在每个文件的FCB(或索引结点)中增加一个访问控制列表(AccessControl List, ACL),该表中记录了各个用户可以对该文件执行哪些操作。
小结:
文件系统的层次结构
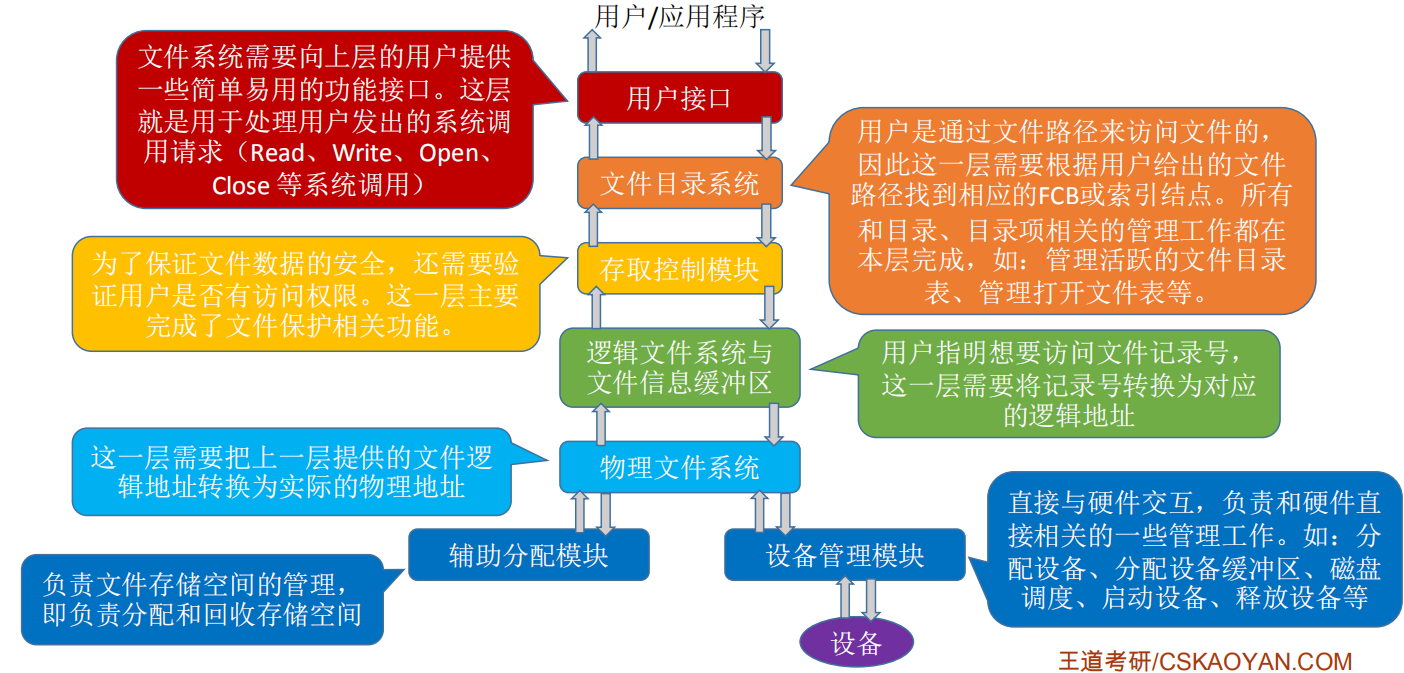
用一个例子来辅助记忆文件系统的层次结构:假设某用户请求删除文件 “D:/工作目录/学生信息.xlsx” 的最后100条记录。
用户需要通过操作系统提供的接口发出上述请求——用户接口
由于用户提供的是文件的存放路径,因此需要操作系统一层一层地查找目录,找到对应的目录项——文件目录系统
不同的用户对文件有不同的操作权限,因此为了保证安全,需要检查用户是否有访问权限——存取控制模块(存取控制验证层)
验证了用户的访问权限之后,需要把用户提供的“记录号”转变为对应的逻辑地址——逻辑文件系统与文件信息缓冲区
知道了目标记录对应的逻辑地址后,还需要转换成实际的物理地址——物理文件系统
要删除这条记录,必定要对磁盘设备发出请求——设备管理程序模块
删除这些记录后,会有一些盘块空闲,因此要将这些空闲盘块回收——辅助分配模块
4.9、磁盘结构
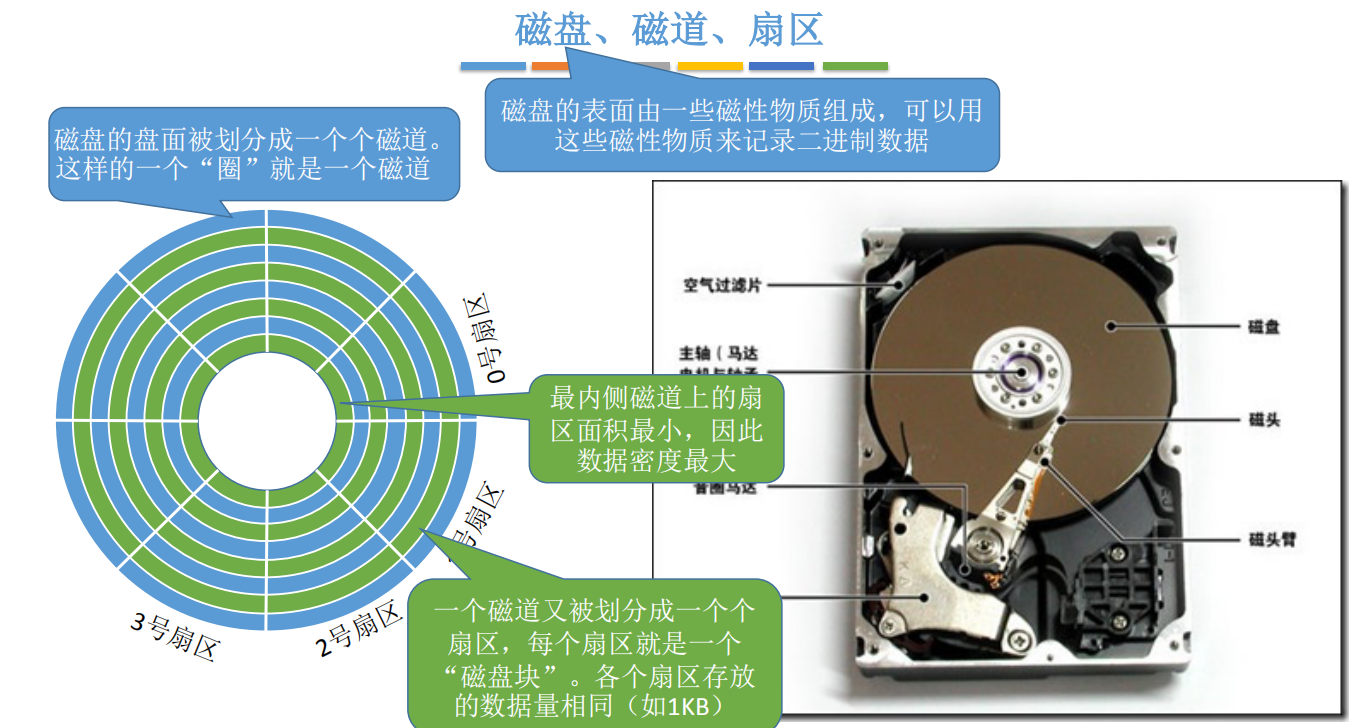
如何在磁盘中读/写数据:需要把“磁头”移动到想要读/写的扇区所在的磁道。磁盘会转起来,让目标扇区从磁头下面划过,才能完成对扇区的读/写操作。
盘面、柱面
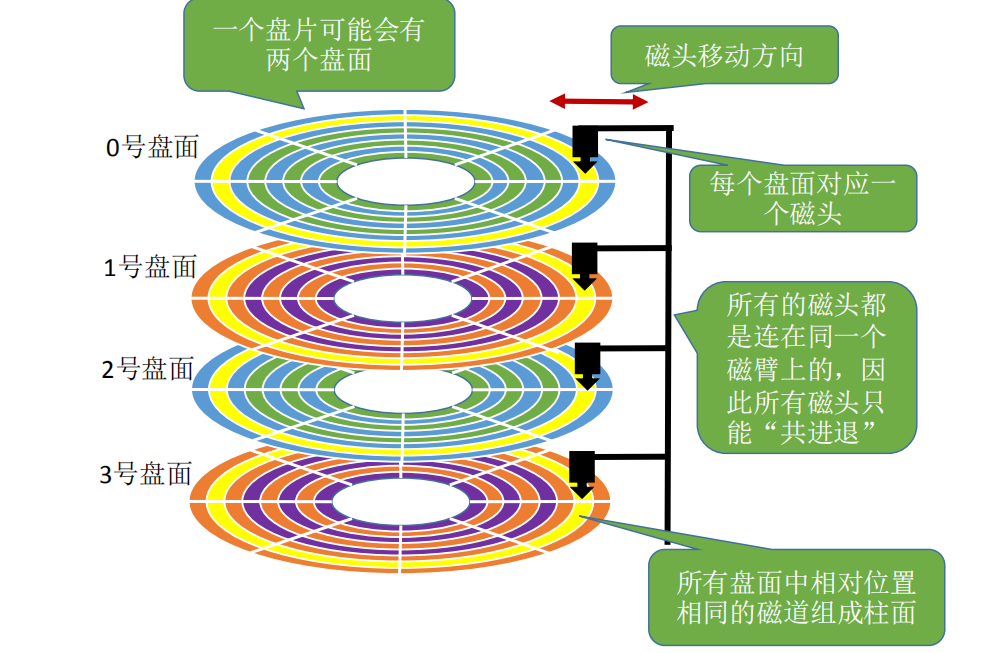
磁盘的物理地址:
可用(柱面号,盘面号,扇区号)来定位任意一个“磁盘块”。在“文件的物理结构”小节中,我们经常提到文件数据存放在外存中的几号块,这个块号就可以转换成(柱面号,盘面号,扇区号)的地址形式。可根据该地址读取一个“块”
- 根据“柱面号”移动磁臂,让磁头指向指定柱面;
- 激活指定盘面对应的磁头;
- 磁盘旋转的过程中,指定的扇区会从磁头下面划过,这样就完成了对指定扇区的读/写。
磁盘的分类:
磁头可以移动的称为活动头磁盘。磁臂可以来回伸缩来带动磁头定位磁道
磁头不可移动的称为固定头磁盘。这种磁盘中每个磁道有一个磁头
盘片可以更换的称为可换盘磁盘
盘片不可更换的称为固定盘磁盘
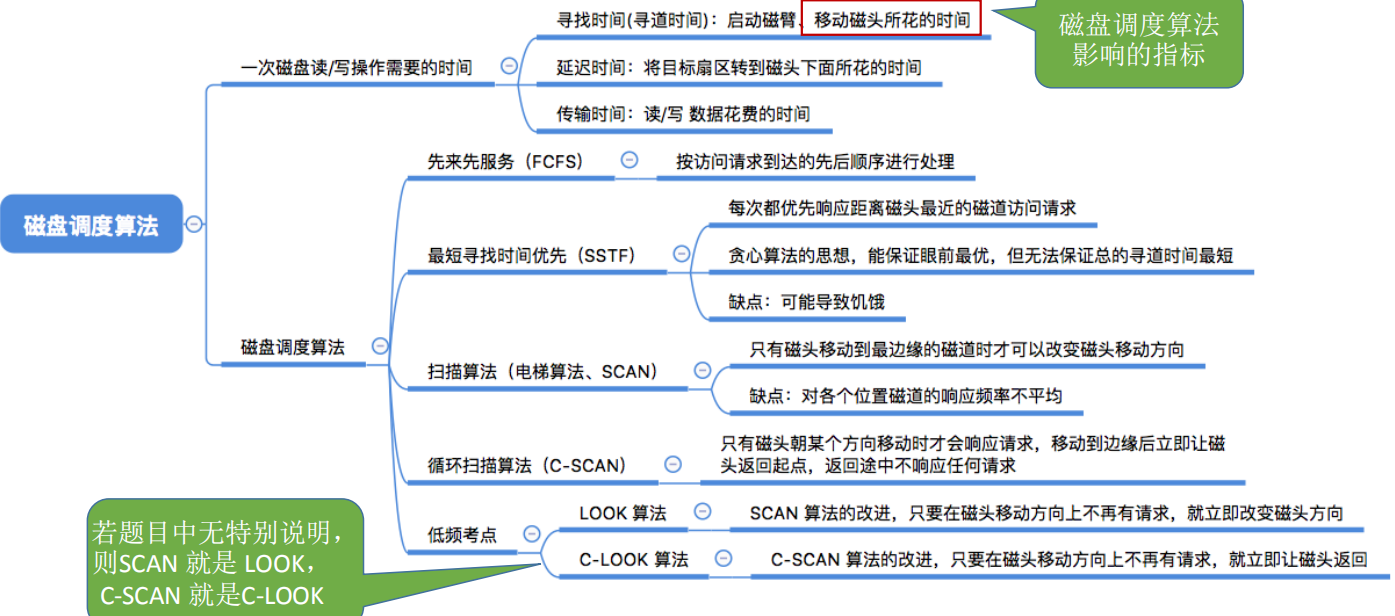
4.10、磁盘调度算法
一次磁盘读/写操作需要的时间
寻找时间(寻道时间)TS:在读/写数据前,将磁头移动到指定磁道所花的时间。
启动磁头臂是需要时间的。假设耗时为 s;
移动磁头也是需要时间的。假设磁头匀速移动,每跨越一个磁道耗时为 m,总共需要跨越 n 条磁道。则:寻道时间 TS = s + m*n
延迟时间TR:通过旋转磁盘,使磁头定位到目标扇区所需要的时间。设磁盘转速为 r (单位:转/秒,或 转/分),则平均所需的延迟时间 TR = (1/2)*(1/r) = 1/2r
传输时间Tt:从磁盘读出或向磁盘写入数据所经历的时间,假设磁盘转速为 r,此次读/写的字节数为 b,每个磁道上的字节数为 N。则:传输时间Tt = (1/r) * (b/N) = b/(rN)
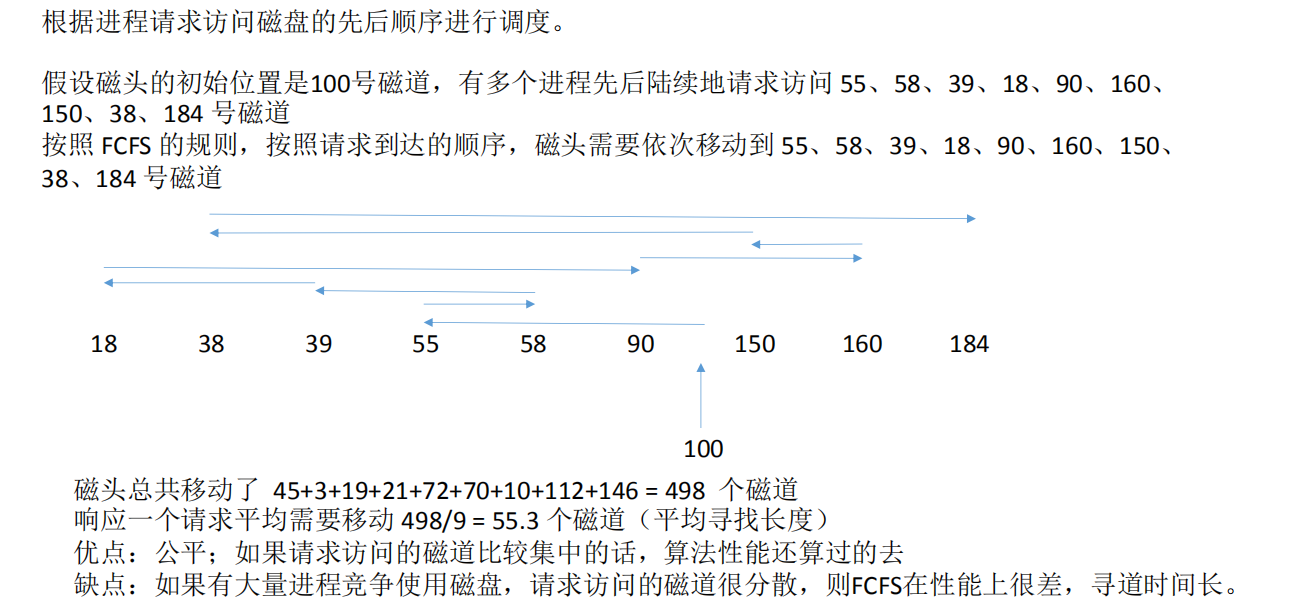
先来先服务算法(FCFS)
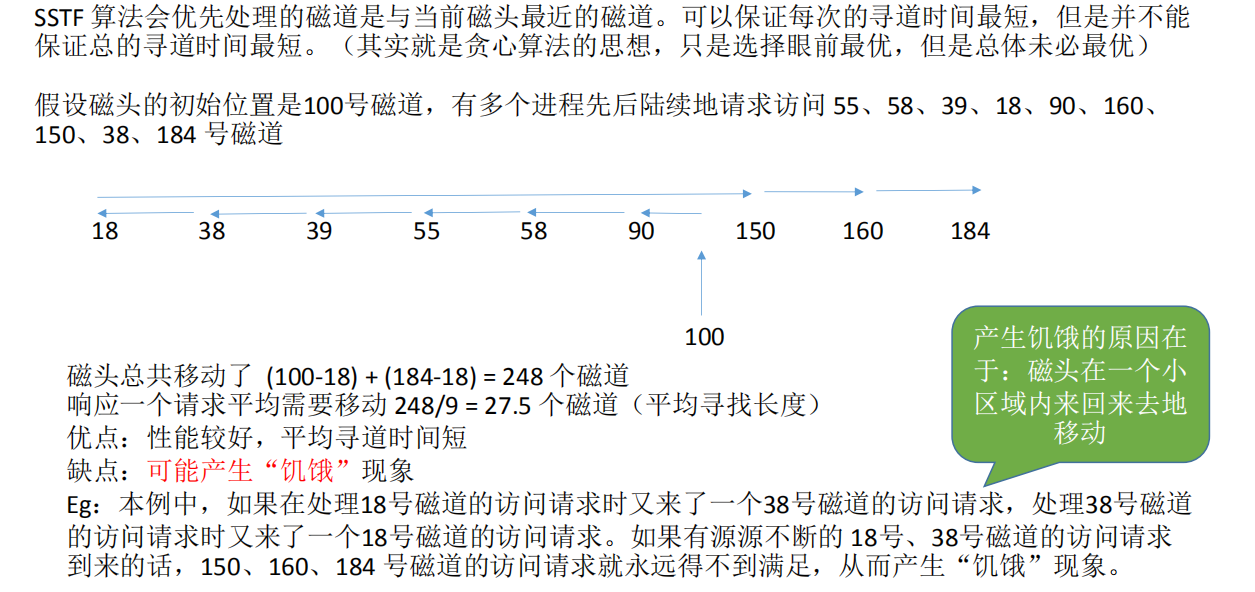
最短寻找时间优先(SSTF)
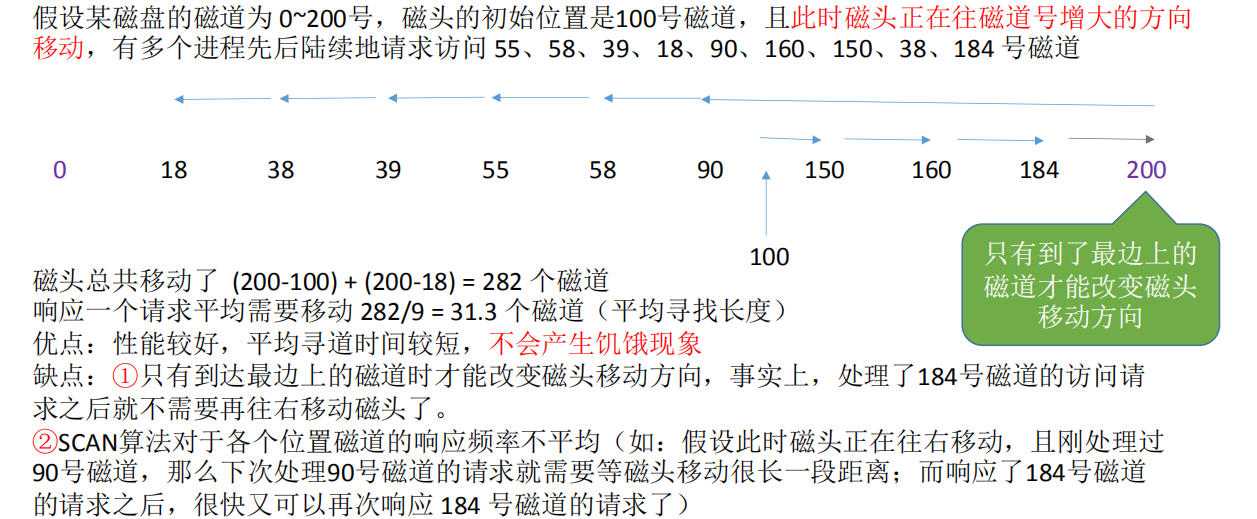
扫描算法(SCAN):
SSTF 算法会产生饥饿的原因在于:磁头有可能在一个小区域内来回来去地移动。为了防止这个问题,可以规定,只有磁头移动到最外侧磁道的时候才能往内移动,移动到最内侧磁道的时候才能往外移 动。这就是扫描算法(SCAN)的思想。由于磁头移动的方式很像电梯,因此也叫电梯算法。
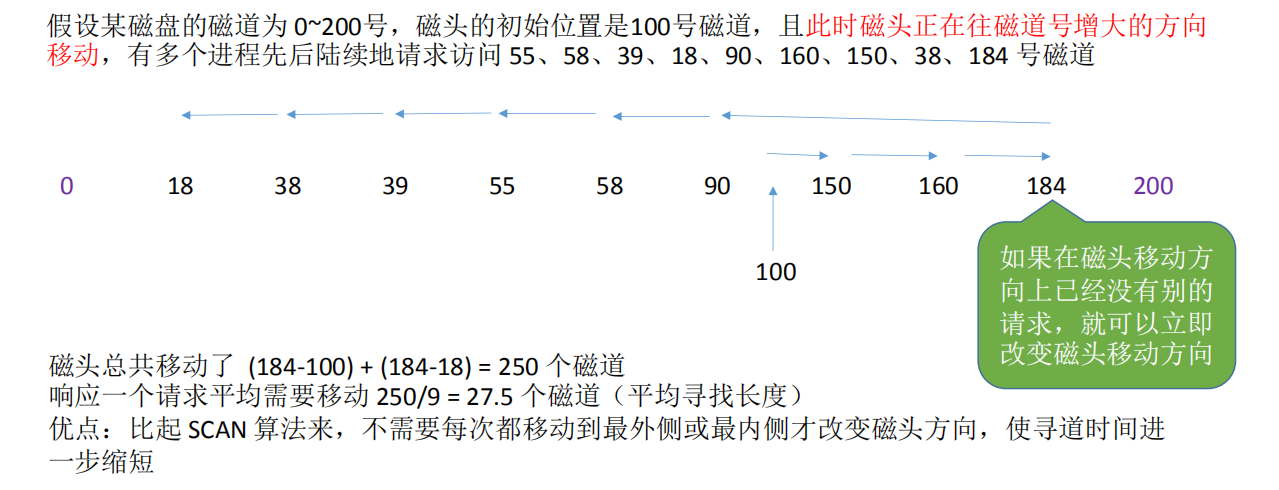
LOOK 调度算法
扫描算法(SCAN)中,只有到达最边上的磁道时才能改变磁头移动方向,事实上,处理了184号磁道的访问请求之后就不需要再往右移动磁头了。LOOK 调度算法就是为了解决这个问题,如果在磁头移动方向上已经没有别的请求,就可以立即改变磁头移动方向。(边移动边观察,因此叫 LOOK)
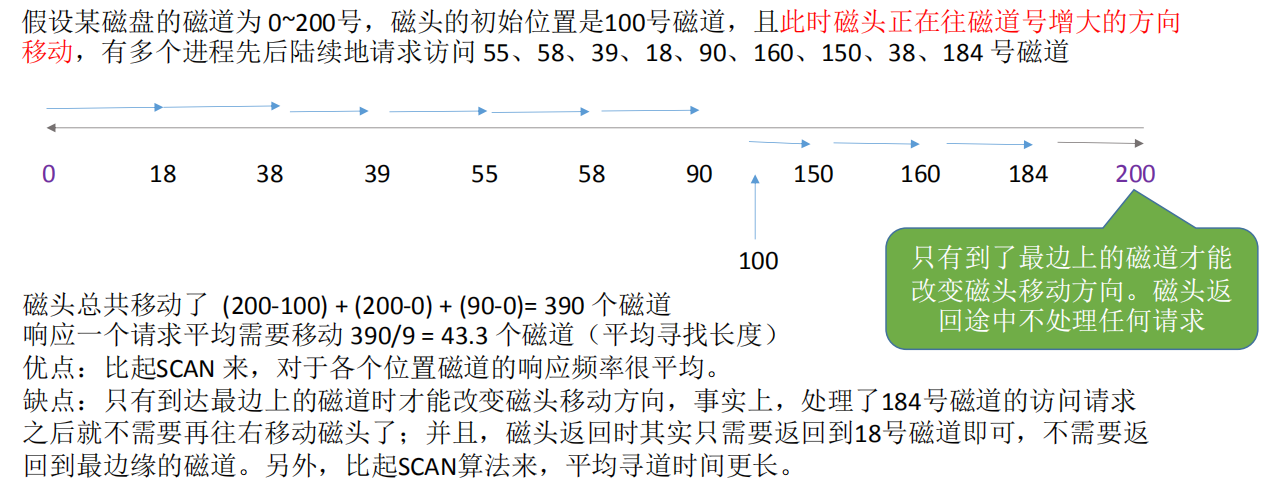
循环扫描算法(C-SCAN)
SCAN算法对于各个位置磁道的响应频率不平均,而 C-SCAN 算法就是为了解决这个问题。规定只有磁头朝某个特定方向移动时才处理磁道访问请求,而返回时直接快速移动至起始端而不处理任何请求。
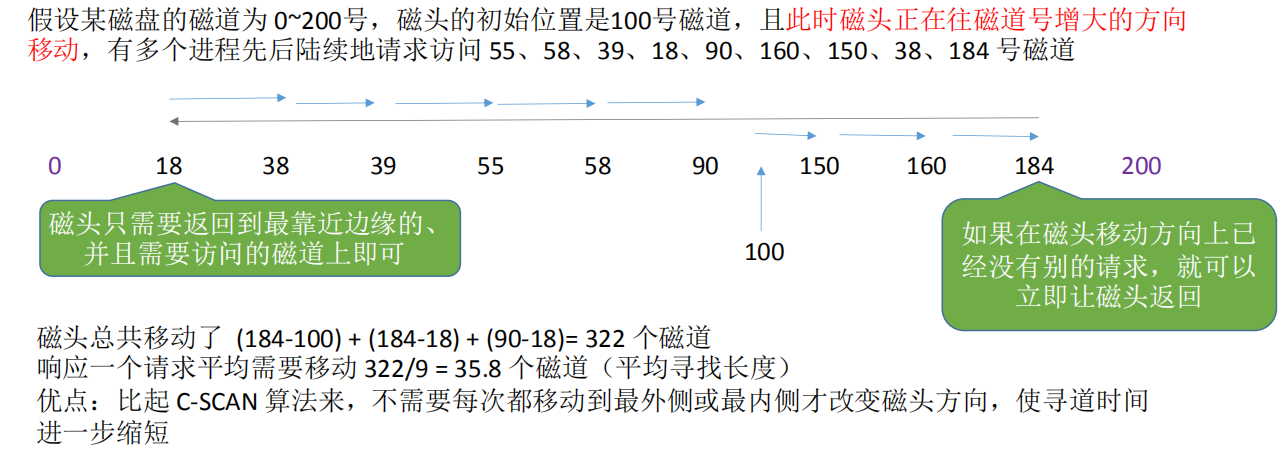
C-LOOK 调度算法
C-SCAN 算法的主要缺点是只有到达最边上的磁道时才能改变磁头移动方向,并且磁头返回时不一定需要返回到最边缘的磁道上。C-LOOK 算法就是为了解决这个问题。如果磁头移动的方向上已经没有磁道访问请求了,就可以立即让磁头返回,并且磁头只需要返回到有磁道访问请求的位置即可。
小结:
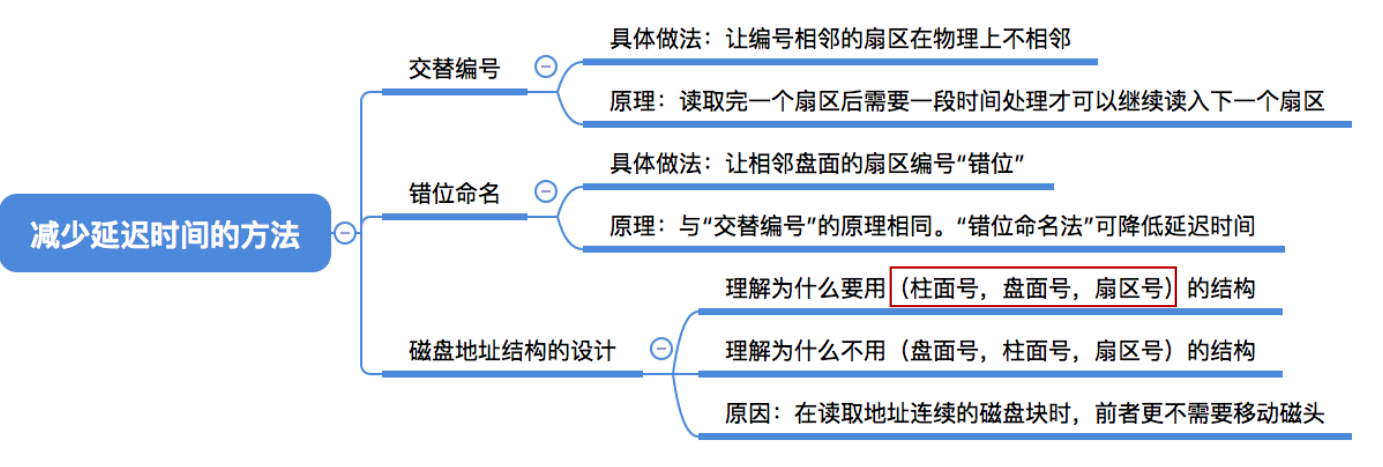
4.11、减少延迟时间的方法
减少延迟时间的方法:交替编号
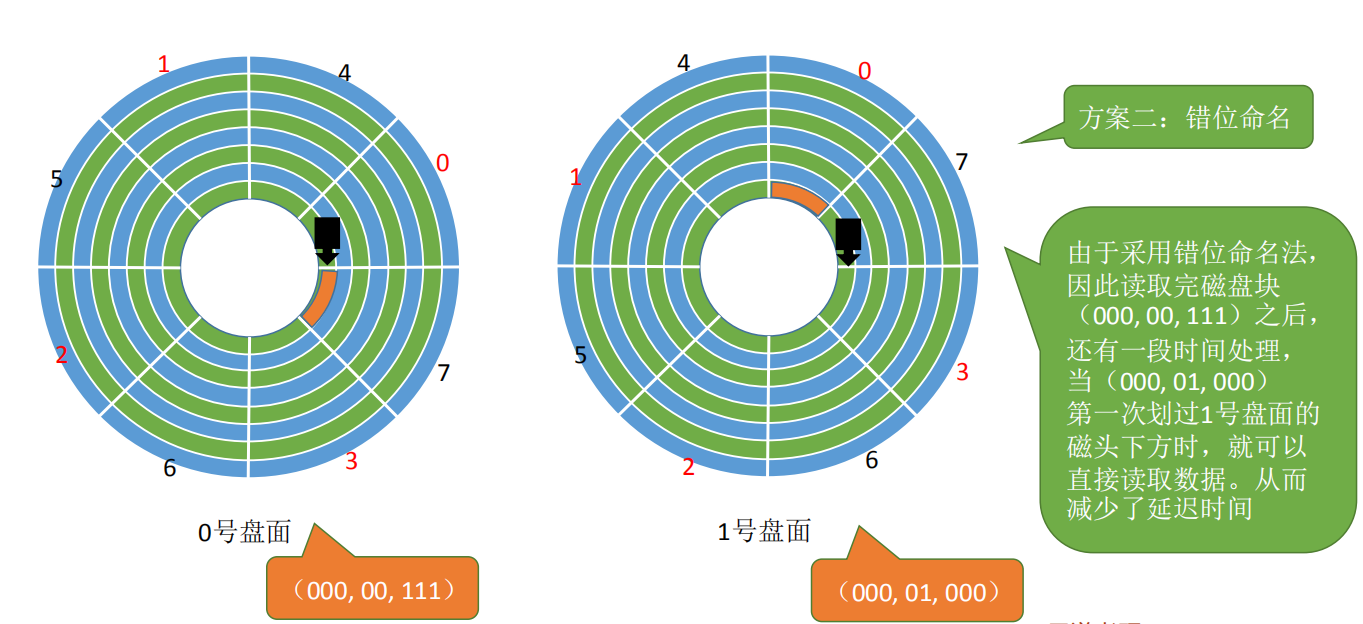
若采用交替编号的策略,即让逻辑上相邻的扇区在物理上有一定的间隔,可以使读取连续的逻辑扇区所需要的延迟时间更小。
磁盘地址结构的设计
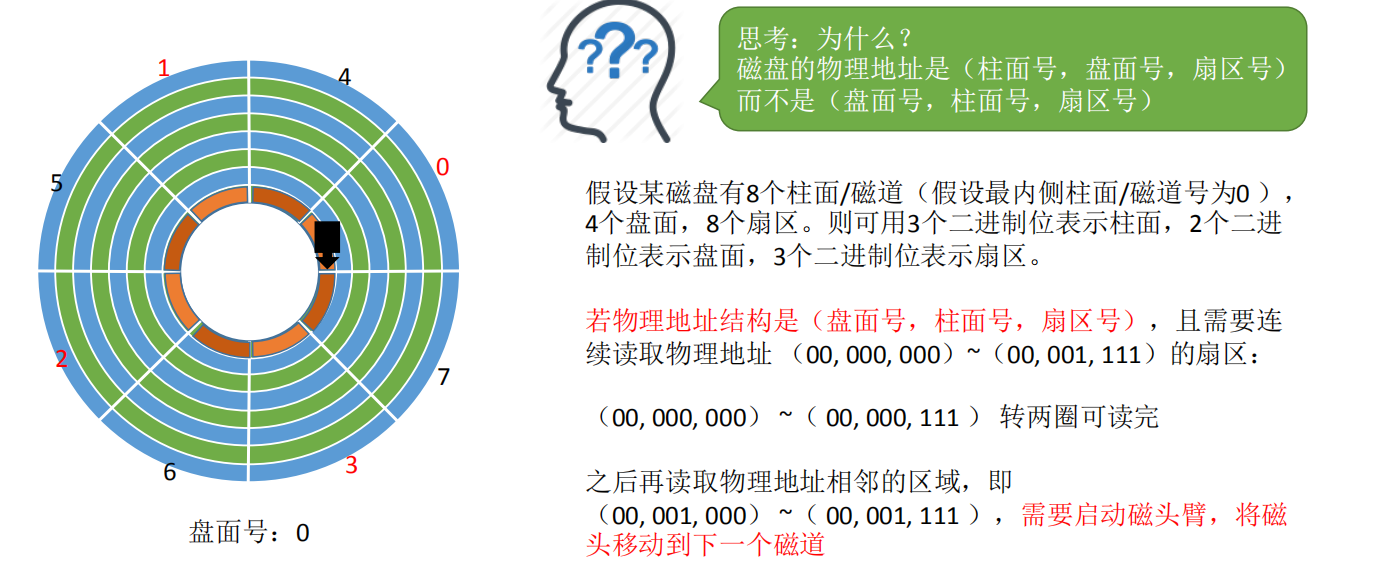
若物理地址结构是(柱面号,盘面号,扇区号)由于柱面号/磁道号相同,只是盘面号不同,因此不需要移动磁头臂。只需要激活相邻盘面的磁头即可
减少延迟时间的方法:错位命名
小结:
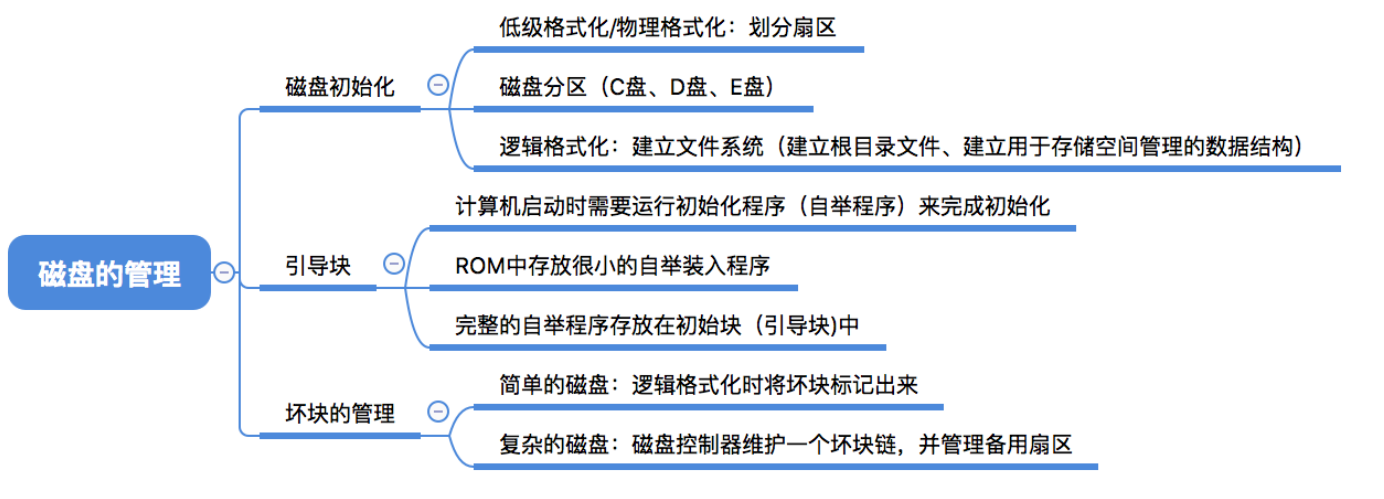
4.12、磁盘的管理
磁盘初始化:
- 进行低级格式化(物理格式化),将磁盘的各个磁道划分为扇区。一个扇区通常可分为 头、数据区域(如512B大小)、尾 三个部分组成。管理扇区所需要的各种数据结构一般存放在头、尾两个部分,包括扇区校验码(如奇偶校验、CRC循环冗余校验码等,校验码用于校验扇区中的数据是否发生错误)
- 将磁盘分区,每个分区由若干柱面组成(即分为我们熟悉的 C盘、D盘、E盘)
- 进行逻辑格式化,创建文件系统。包括创建文件系统的根目录、初始化存储空间管理所用的数据结构
引导块:
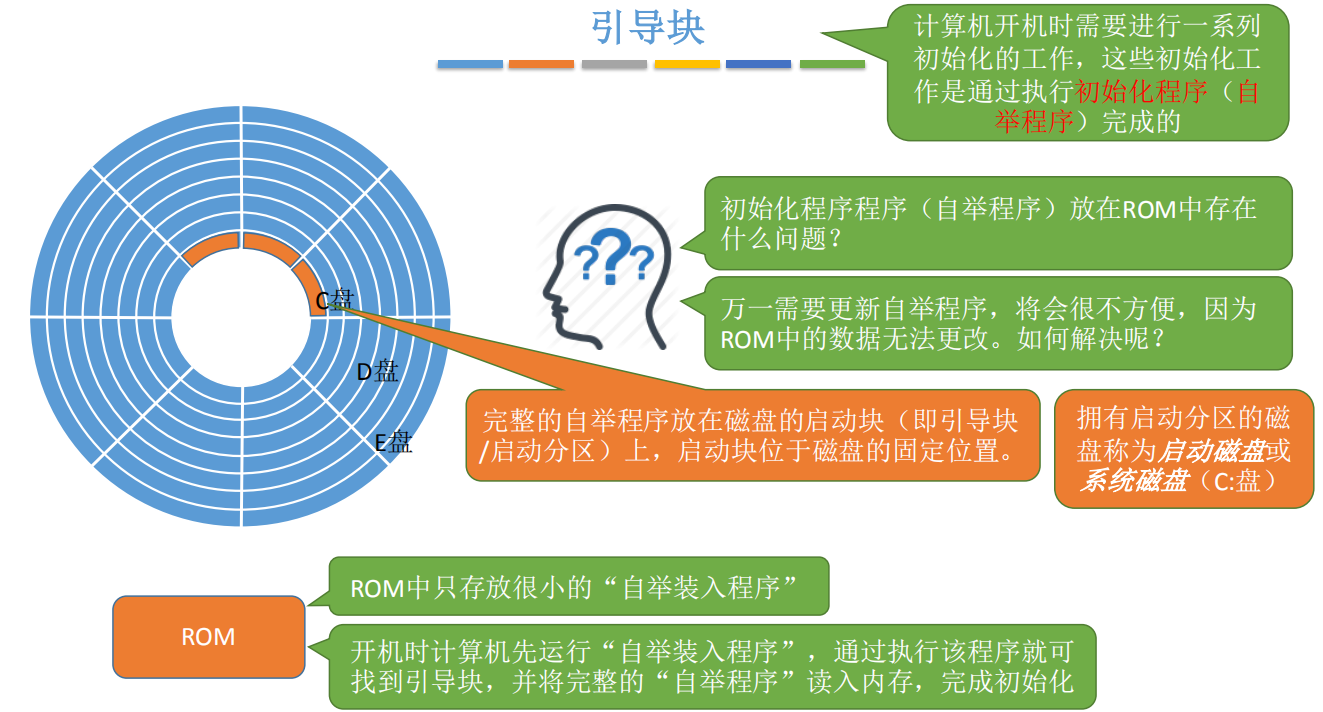
坏块的管理:
对于简单的磁盘,可以在逻辑格式化时(建立文件系统时)对整个磁盘进行坏块检查,标明哪些扇区是坏扇区,比如:在 FAT 表上标明。(在这种方式中,坏块对操作系统不透明)
对于复杂的磁盘,磁盘控制器(磁盘设备内部的一个硬件部件)会维护一个坏块链表。在磁盘出厂前进行低级格式化(物理格式化)时就将坏块链进行初始化。会保留一些“备用扇区”,用于替换坏块。这种方案称 为扇区备用。且这种处理方式中,坏块对操作系统透明。
小结:
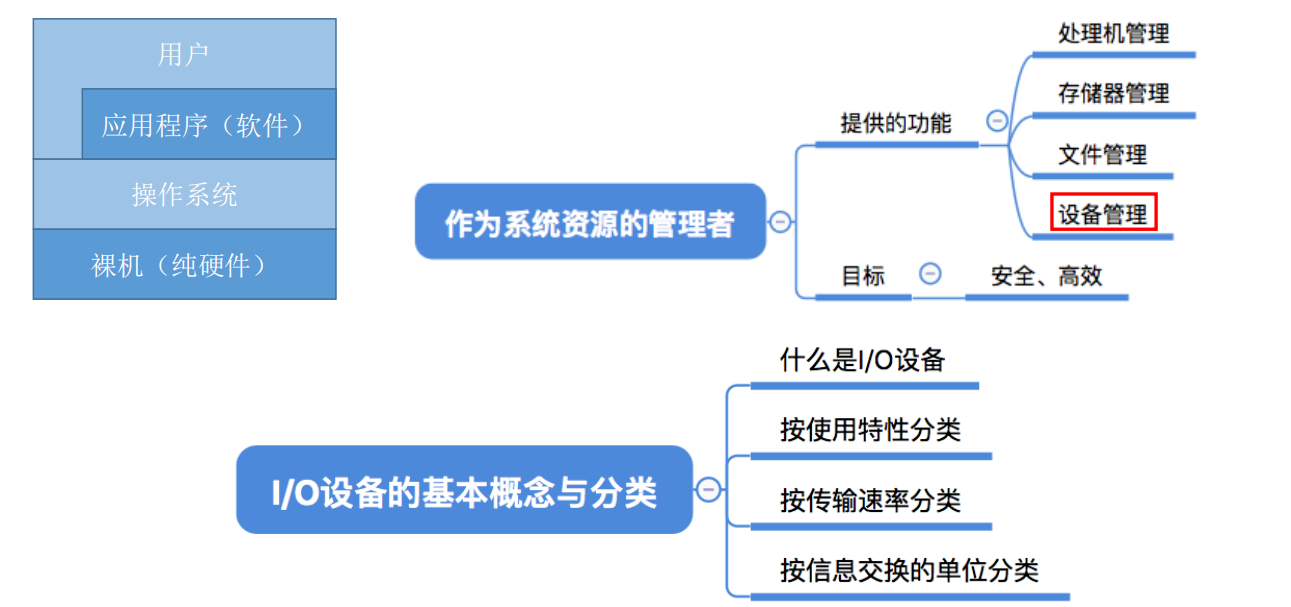
五、IO设备
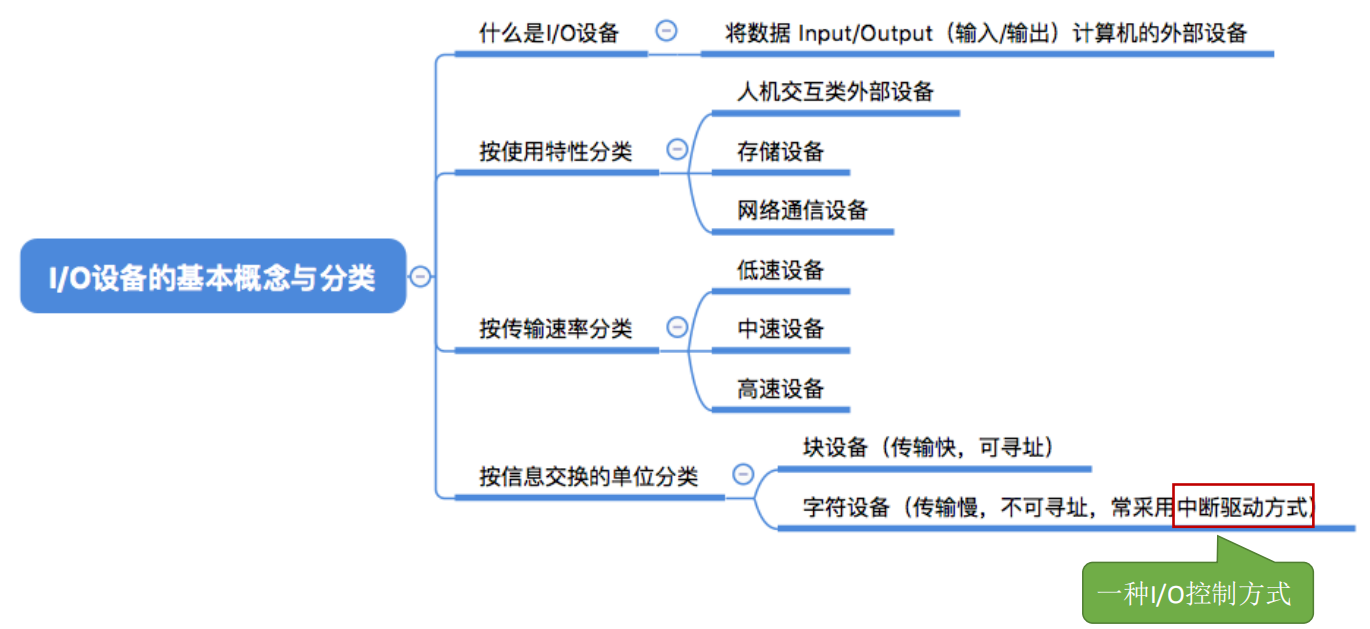
5.1、I/O设备的基本概念和分类
什么是I/O设备?
“I/O” 就是 “输入/输出”(Input/Output)
I/O 设备就是可以将数据输入到计算机,或者可以接收计算机输出数据的外部设备,属于计算机中的硬件部件
I/O设备按使用特性分类:
- 人机交互类外部设备(数据传输速度慢)
- 存储设备(数据传输速度块)
- 网络通信设备(数据传输速度基于上述两者之间)
人机交互类外设:鼠标、键盘、打印机等——用于人机交互
存储设备:移动硬盘、光盘等——用于数据存储
网络通信设备:调制解调器等——用于网络通信
I/O按传输速率分类:
- 低速设备
- 中速设备
- 高速设备
低速设备:鼠标、键盘等——传输速率为每秒几个到几百字节
中速设备:如激光打印机等——传输速率为每秒数千至上万个字节
高速设备:如磁盘等——传输速率为每秒数千字节至千兆字节的设备
I/O设备按照信息交换的单位分类:
- 块设备,传输速率较高,可寻址,即对它可随机地读/写任一块
- 字符设备,传输速率较慢,不可寻址,在输入/输出时常采用中断驱动方式
块设备:如磁盘等——数据传输的基本单位是“块”
字符设备:鼠标、键盘等——数据传输的基本单位是字符。
小结:
5.2、I/O控制器
I/O设备:
- 机械部件
- 电子部件(I/O控制器,设备控制器)
I/O设备的机械部件主要用来执行具体I/O操作。
如我们看得见摸得着的鼠标/键盘的按钮;显示器的LED屏;移动硬盘的磁臂、磁盘盘面。
I/O设备的电子部件通常是一块插入主板扩充槽的印刷电路板。
5.2.1、I/O设备的电子部件(I/O控制器)
CPU无法直接控制I/O设备的机械部件,因此I/O设备还要有一个电子部件作为CPU和I/O设备机械部件之间的“中介”,用于实现CPU对设备的控制。
这个电子部件就是I/O控制器,又称设备控制器。CPU可控制I/O控制器,又由I/O控制器来控制设备的机械部件。
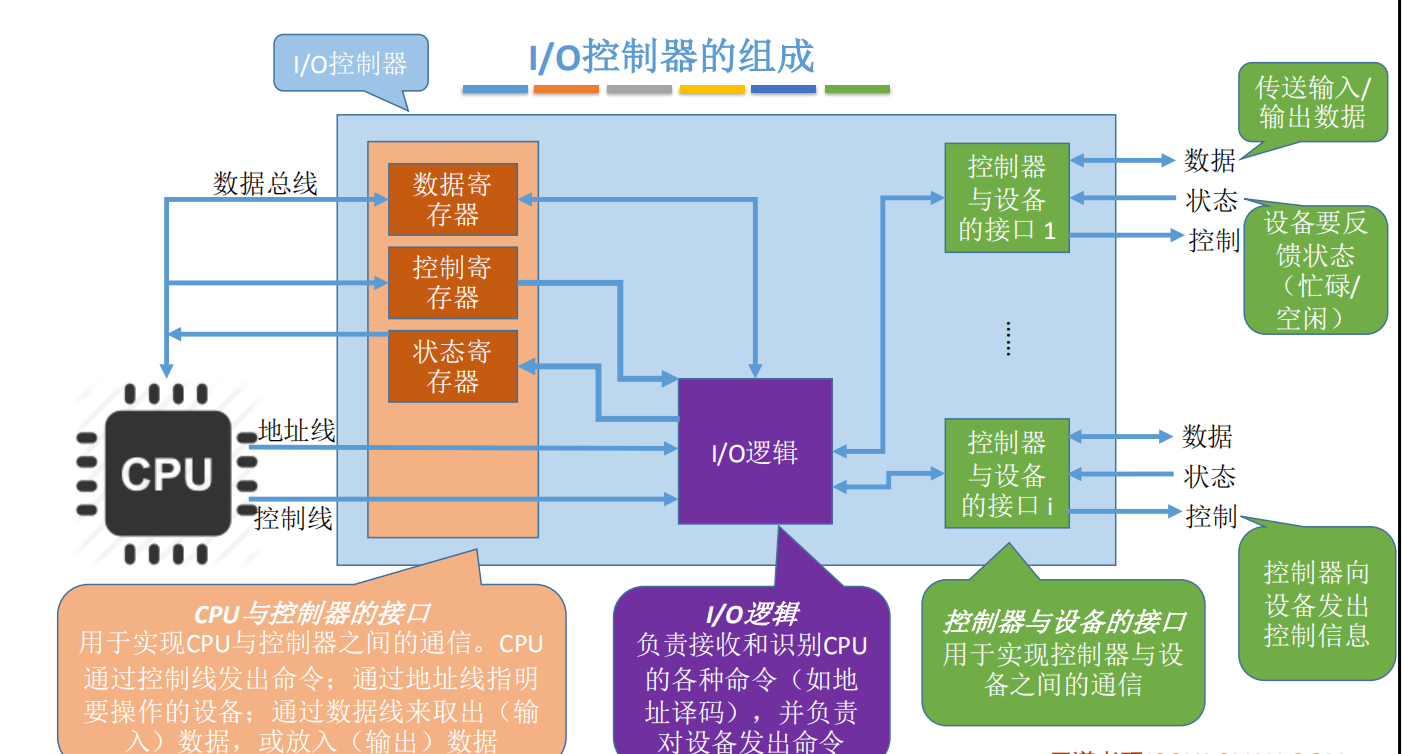
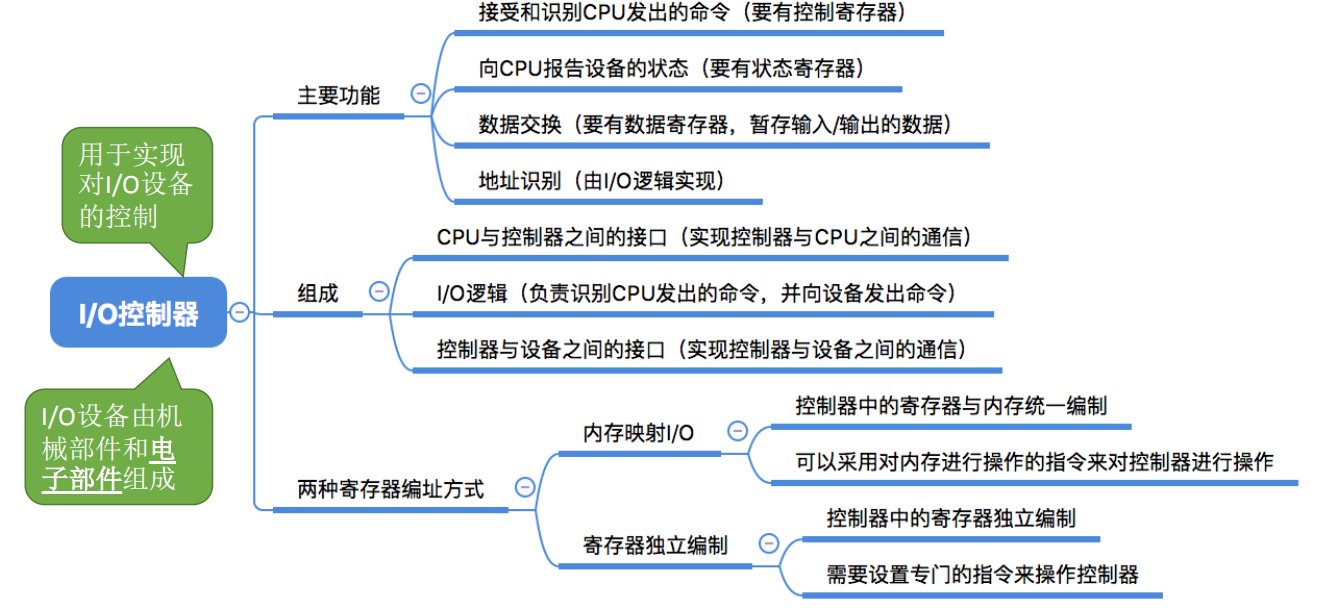
I/O控制器的功能:
接收和识别发出的命令
如CPU发来的 read/write 命令,I/O控制器中会有相应的控制寄存器来存放命令和参数
向CPU报告设备的状态
I/O控制器中会有相应的状态寄存器,用于记录I/O设备的当前状态。如:1表示空闲,0表示忙碌
数据交换
I/O控制器中会设置相应的数据寄存器。输出时,数据寄存器用于暂存CPU发来的数据,之后再由控制器传送设备。输入时,数据寄存器用于暂存设备发来的数据,之后CPU从数据寄存器中取走数据。
地址识别
类似于内存的地址,为了区分设备控制器中的各个寄存器,也需要给各个寄存器设置一个特定的“地址”。I/O控制器通过CPU提供的“地址”来判断CPU要读/写的是哪个寄存器
I/O控制器的组成:
值得注意的小细节:
一个I/O控制器可能会对应多个设备;
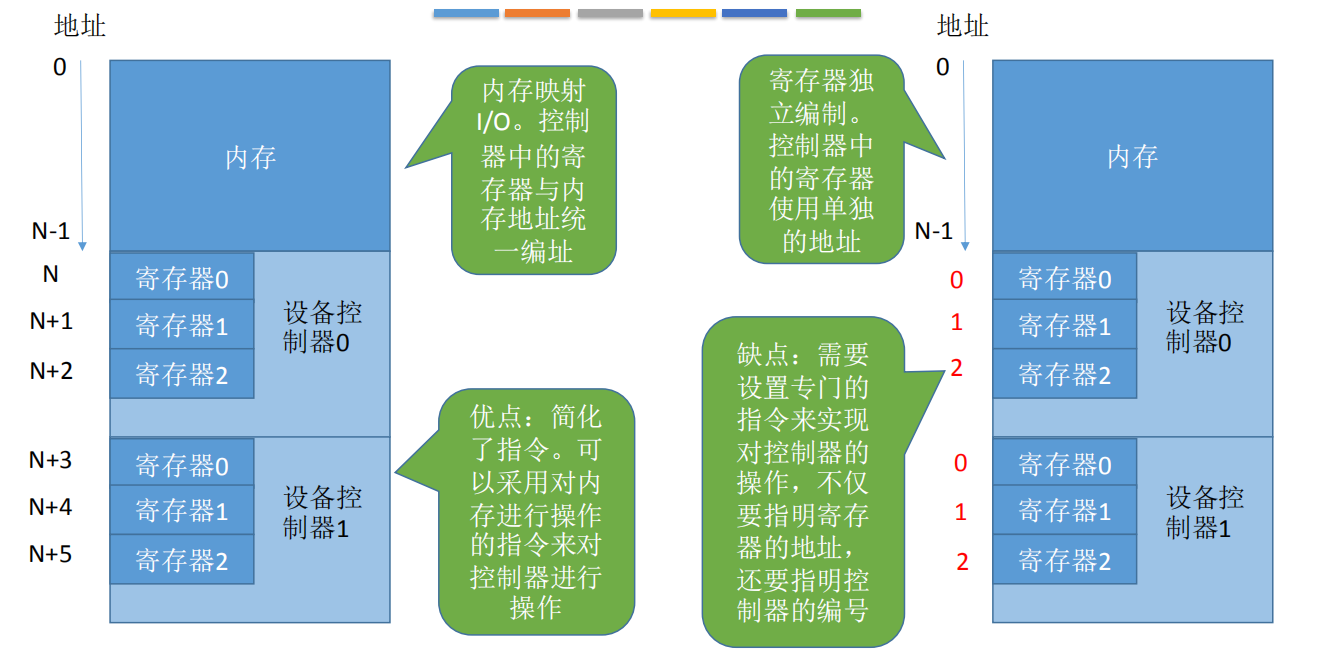
数据寄存器、控制寄存器、状态寄存器可能有多个(如:每个控制/状态寄存器对应一个具体的设备),且这些寄存器都要有相应的地址,才能方便CPU操作。有的计算机会让这些寄存器占用内存地址的一部分,称为内存映像I/O;另一些计算机则采用I/O专用地址,即寄存器独立编址。
内存映像I/O v.s寄存器独立编址
小结:
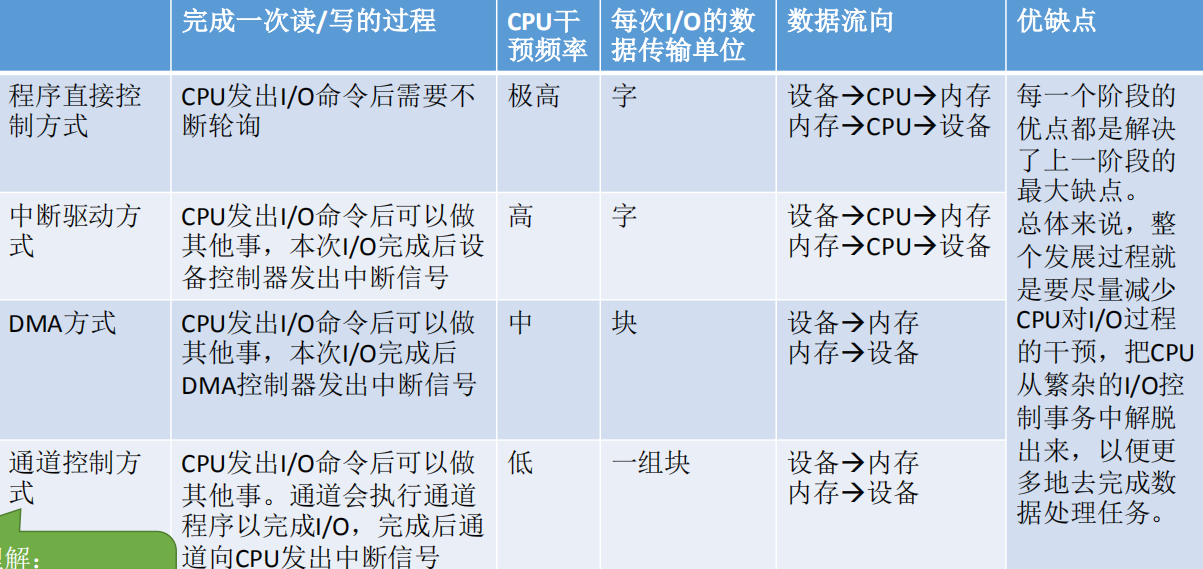
5.2.2、I/O控制方式
需要注意的问题:
完成一次读/写操作的流程;
CPU干预的频率;
数据传送的单位;
数据的流向;
主要缺点和主要优点。
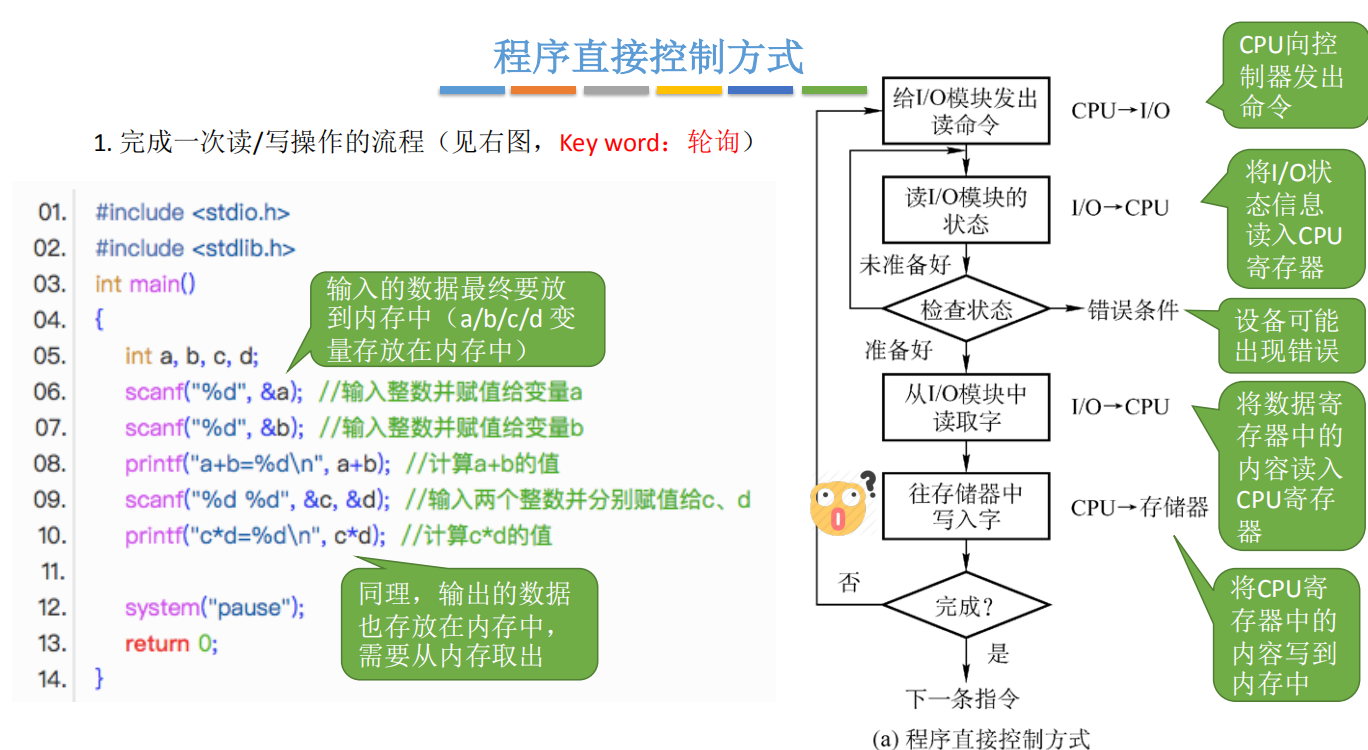
程序直接控制方式:
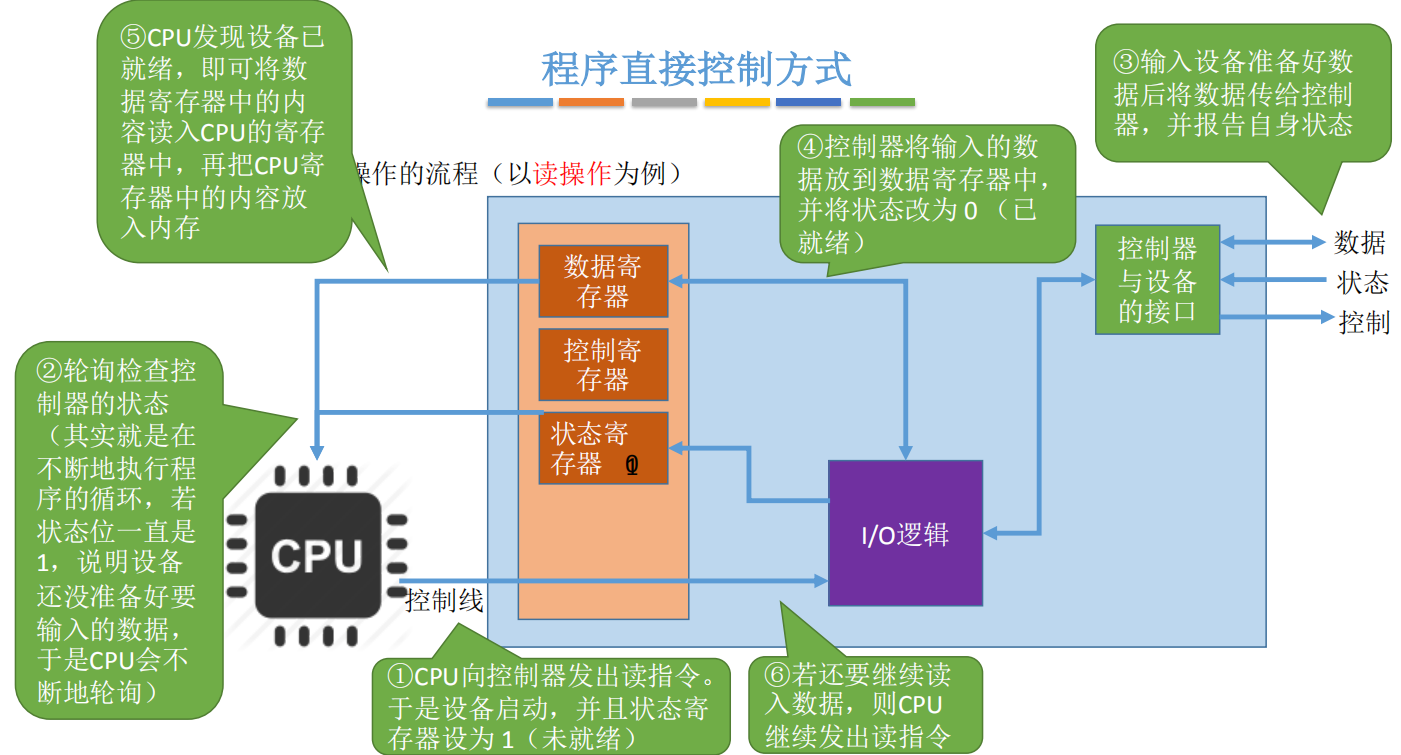
完成一次读/写操作的流程
CPU干预的频率很频繁,I/O操作开始之前、完成之后需要CPU介入,并且在等待I/O完成的过程中CPU需要不断地轮询检查。
数据传送的单位每次读/写一个字
数据的流向读操作(数据输入):I/O设备——CPU——内存,写操作(数据输出):内存——CPU——I/O设备,每个字的读/写都需要CPU的帮助
主要缺点和主要优点
优点:实现简单。在读/写指令之后,加上实现循环检查的一系列指令即可(因此才称为“程序直接控制方式”)
缺点:CPU和I/O设备只能串行工作,CPU需要一直轮询检查,长期处于“忙等”状态 ,CPU利用率低。
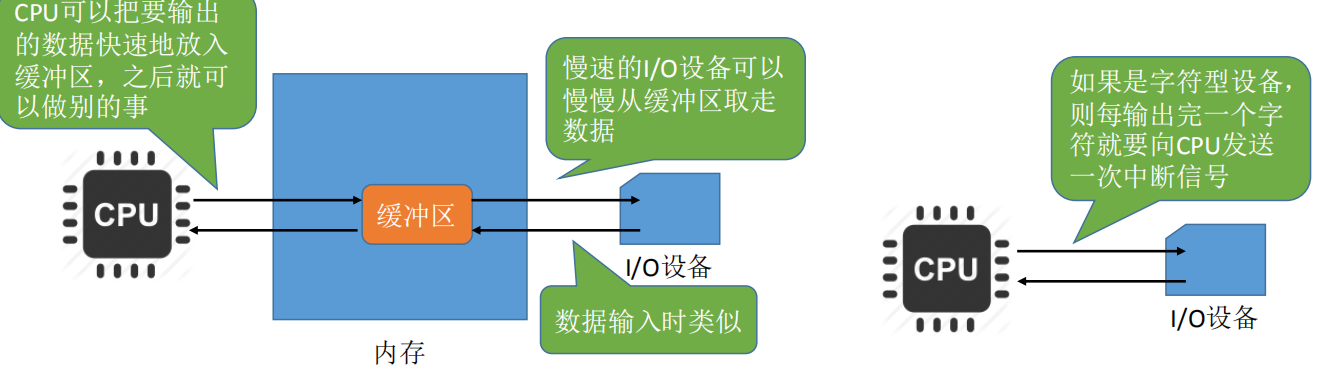
中断驱动方式:
引入中断机制。由于I/O设备速度很慢,因此在CPU发出读/写命令后,可将等待I/O的进程阻塞,先切换到别的进程执行。当I/O完成后,控制器会向CPU发出一个中断信号,CPU检测到中断信号后,会保存当前进程的运行环境信息,转去执行中断处理程序处理该中断。处理中断的过程中,CPU从I/O控制器读一个字的数据传送到CPU寄存器,再写入主存。接着,CPU恢复等待I/O的进程(或其他进程)的运行环境,然后继续执行。
注意:
CPU会在每个指令周期的末尾检查中断;
中断处理过程中需要保存、恢复进程的运行环境,这个过程是需要一定时间开销的。可见,如果中断发生的频率太高,也会降低系统性能
中断驱动方式流程:
完成一次读/写操作的流程(见右图,Key word:中断)
CPU干预的频率 每次I/O操作开始之前、完成之后需要CPU介入。等待I/O完成的过程中CPU可以切换到别的进程执行。
数据传送的单位 每次读/写一个字
数据的流向读操作(数据输入):I/O设备——CPU——内存,写操作(数据输出):内存——CPU——I/O设备
主要缺点和主要优点
优点:与“程序直接控制方式”相比,在“中断驱动方式”中,I/O控制器会通过中断信号主动报告I/O已完成,CPU不再需要不停地轮询。CPU和I/O设备可并行工作,CPU利用率得到明显提升。
缺点:每个字在I/O设备与内存之间的传输,都需要经过CPU。而频繁的中断处理会消耗较多的CPU时间。
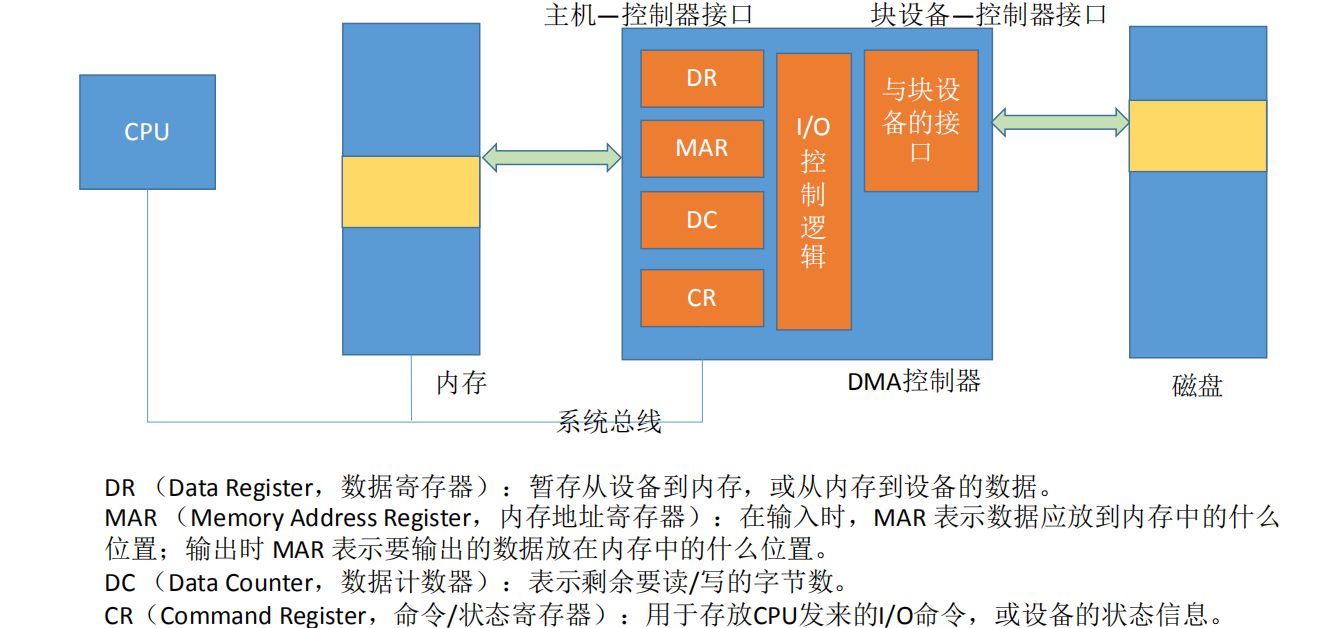
DMA方式:
与“中断驱动方式”相比,DMA方式( Direct Memory Access,直接存储器存取。主要用于块设备的I/O控制)有这样几个改进:
数据的传送单位是“块”。不再是一个字、一个字的传送;
数据的流向是从设备直接放入内存,或者从内存直接到设备。不再需要CPU作为“快递小哥”。
仅在传送一个或多个数据块的开始和结束时,才需要CPU干预。
DMA方式的流程:
完成一次读/写操作的流程
CPU干预的频率仅在传送一个或多个数据块的开始和结束时,才需要CPU干预。
数据传送的单位每次读/写一个或多个块(注意:每次读写的只能是连续的多个块,且这些块读入内存后在内存中也必须是连续的)
数据的流向(不再需要经过CPU)读操作(数据输入):I/O设备——内存,写操作(数据输出):内存——I/O设备
主要缺点和主要优点
优点:数据传输以“块”为单位,CPU介入频率进一步降低。数据的传输不再需要先经过CPU再写入内存,数据传输效率进一步增加。CPU和I/O设备的并行性得到提升。
缺点:CPU每发出一条I/O指令,只能读/写一个或多个连续的数据块。如果要读/写多个离散存储的数据块,或者要将数据分别写到不同的内存区域时,CPU要分别发出多条I/O指令,进行多次中断处理才能完成。
通道控制方式:
通道:一种硬件,可以理解为是 “弱鸡版的CPU”。通道可以识别并执行一系列通道指令
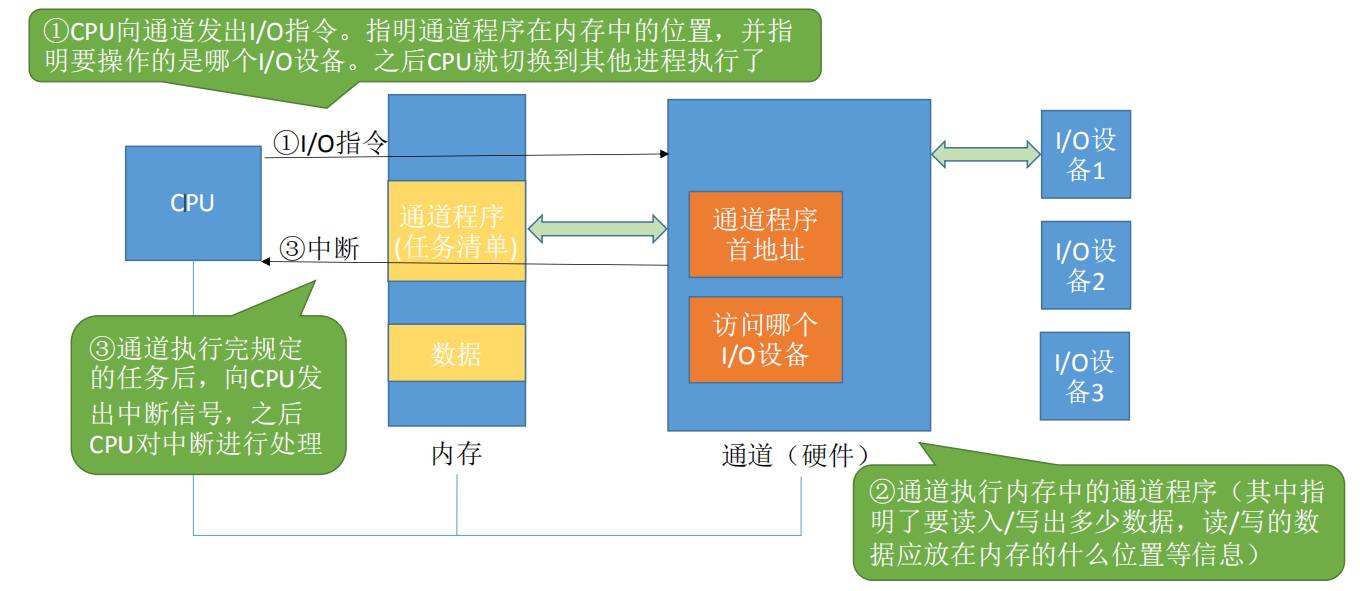
通道控制方式流程:
完成一次读/写操作的流程(见右图)
CPU干预的频率极低,通道会根据CPU的指示执行相应的通道程序,只有完成一组数据块的读/写后才需要发出中断信号,请求CPU干预。
数据传送的单位每次读/写一组数据块
数据的流向(在通道的控制下进行)读操作(数据输入):I/O设备——内存,写操作(数据输出):内存——I/O设备
主要缺点和主要优点
缺点:实现复杂,需要专门的通道硬件支持
优点:CPU、通道、I/O设备可并行工作,资源利用率很高。
小结:
5.3、I/O软件的层次结构
设备独立性软件,又称设备无关性软件。与设备的硬件特性无关的功能几乎都在这一层实现

中断处理程序:
用户通过调用用户层软件提供的库函数发出的I/O请求
用户层软件通过“系统调用”请求设备独立性软件层的服务
设备独立性软件层根据LUT调用设备对应的驱动程序
驱动程序向I/O控制器发出具体命令
等待I/O完成的进程应该被阻塞,因此需要进程切换,而进 程切换必然需要中断处理
5.4、IO核心子系统
I/O调度:用某种算法确定一个好的顺序来处理各个I/O请求。如:磁盘调度(先来先服务算法、最短寻道优先算法、SCAN算法、C-SCAN算法、LOOK算法、C-LOOK算法)。当多个磁盘I/O请求到来时,用某种调度算法确定满足I/O请求的顺序。
同理,打印机等设备也可以用先来先服务算法、优先级算法、短作业优先等算法来确定I/O调度顺序。
操作系统需要实现文件保护功能,不同的用户对各个文件有不同的访问权限(如:只读、读和写等)。
在UNIX系统中,设备被看做是一种特殊的文件,每个设备也会有对应的FCB。当用户请求访问某个设备时,系统根据FCB中记录的信息来判断该用户是否有相应的访问权限,以此实现“设备保护”的功能。(参考“文件保护”小节)
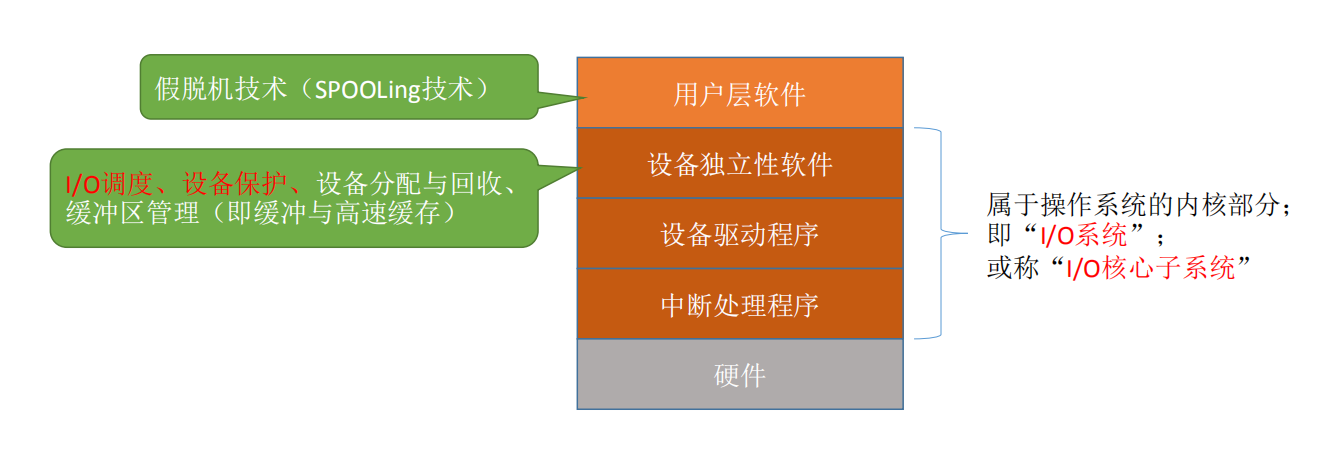
5.5、假脱机技术(SPOOLing技术)
手工操作阶段:主机直接从 I/O设备获得数据,由于设备速度慢,主机速度很快。人机速度矛盾明显,主机要浪费很多时间来等待设备
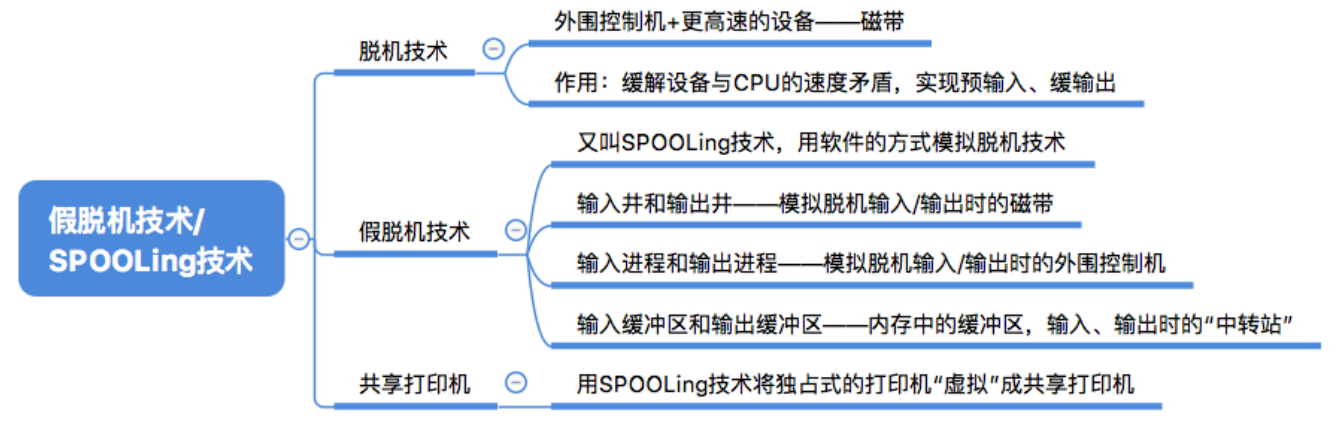
批处理阶段引入了脱机输入/输出技术(用磁带完成):引入脱机技术后,缓解了CPU与慢速I/O设备的速度矛盾。另一方面,即使CPU在忙碌,也可以提前将数据输入到磁带;即使慢速的输出设备正在忙碌,也可以提前将数据输出到磁带。
“假脱机技术”,又称“SPOOLing 技术”是用软件的方式模拟脱机技术。 SPOOLing 系统的组成如下:
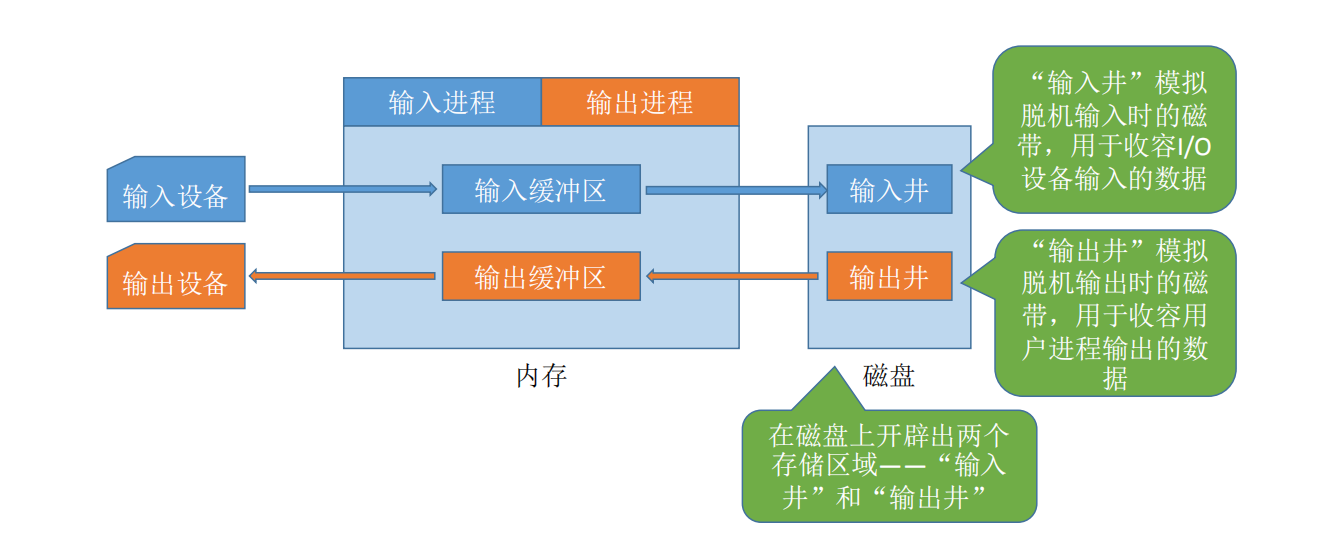
要实现SPOOLing 技术,必须要有多道程序技术的支持。系统会建立 “输入进程”和 “输出进程”。
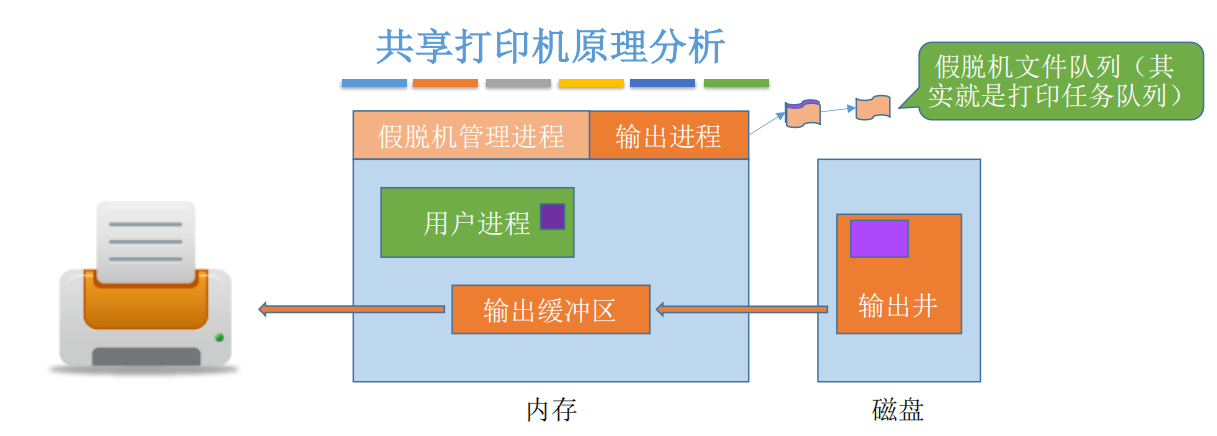
共享打印机原理分析:
独占式设备——只允许各个进程串行使用的设备。一段时间内只能满足一个进程的请求。
共享设备——允许多个进程“同时”使用的设备(宏观上同时使用,微观上可能是交替使用)。可以同时满足多个进程的使用请求。
当多个用户进程提出输出打印的请求时,系统会答应它们的请求,但是并不是真正把打印机分配给他们,而是由假脱机管理进程为每个进程做两件事:
在磁盘输出井中为进程申请一个空闲缓冲区(也就是说,这个缓冲区是在磁盘上的),并将要打 印的数据送入其中;
为用户进程申请一张空白的打印请求表,并将用户的打印请求填入表中(其实就是用来说明用户的打印数据存放位置等信息的),再将该表挂到假脱机文件队列上。当打印机空闲时,输出进程会从文件队列的队头取出一张打印请求表,并根据表中的要求将要打印的数据从输出井传送到输出缓冲区,再输出到打印机进行打印。用这种方式可依次处理完全部的打印任务
虽然系统中只有一个台打印机,但每个进程提出打印请求时,系统都会为在输出井中为其分配一个存储区(相当于分配了一个逻辑设备),使每个用户进程都觉得自己在独占一台打印机,从而实现对打印机的共享。
SPOOLing 技术可以把一台物理设备虚拟成逻辑上的多台设备,可将独占式设备改造成共享设备。
小结:
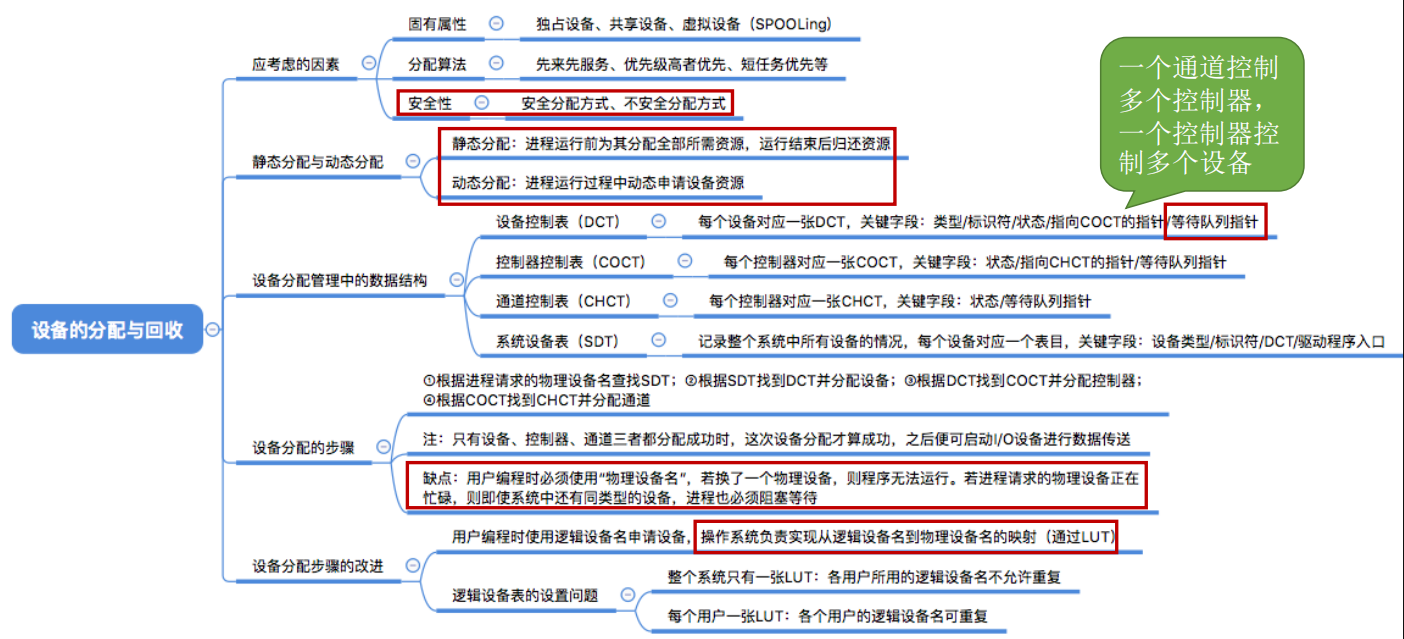
5.6、设备与备份回收
设备的固有属性可分为三种:独占设备、共享设备、虚拟设备。
独占设备——一个时段只能分配给一个进程(如打印机)
共享设备——可同时分配给多个进程使用(如磁盘),各进程往往是宏观上同时共享使用设备,而微观上交替使用。
虚拟设备——采用 SPOOLing 技术将独占设备改造成虚拟的共享设备,可同时分配给多个进程使用(如采用 SPOOLing 技术实现的共享打印机)
从进程运行的安全性上考虑,设备分配有两种方式:
- 安全分配方式:为进程分配一个设备后就将进程阻塞,本次I/O完成后才将进程唤醒。(eg:考虑进程请求打印机打印输出的例子) 一个时段内每个进程只能使用一个设备
- 优点:破坏了“请求和保持”条件,不会死锁
- 缺点:对于一个进程来说,CPU和I/O设备只能串行工作
- 不安全分配方式:进程发出I/O请求后,系统为其分配I/O设备,进程可继续执行,之后还可以发出新的I/O请求。只有某个I/O请求得不到满足时才将进程阻塞。一个进程可以同时使用多个设备
- 优点:进程的计算任务和I/O任务可以并行处理,使进程迅速推进
- 缺点:有可能发生死锁(死锁避免、死锁的检测和解除)
静态分配:进程运行前为其分配全部所需资源,运行结束后归还资源
动态分配:进程运行过程中动态申请设备资源
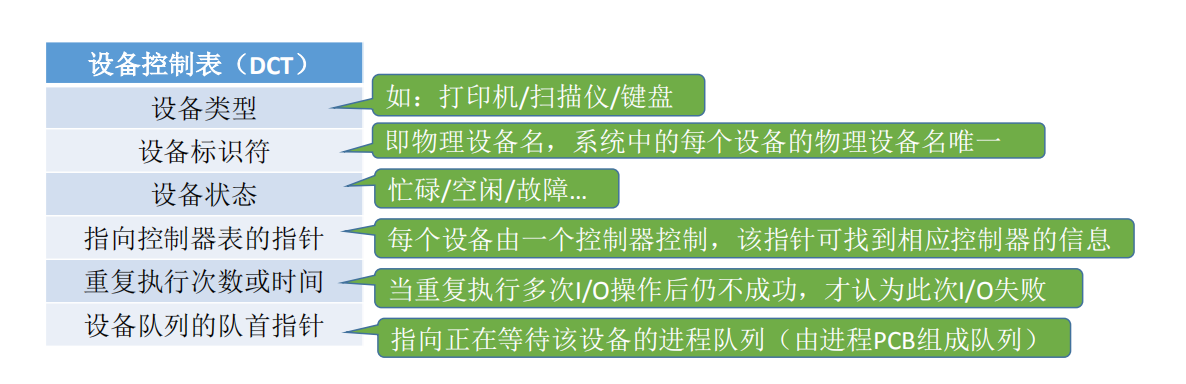
设备控制表(DCT):系统为每个设备配置一张DCT,用于记录设备情况
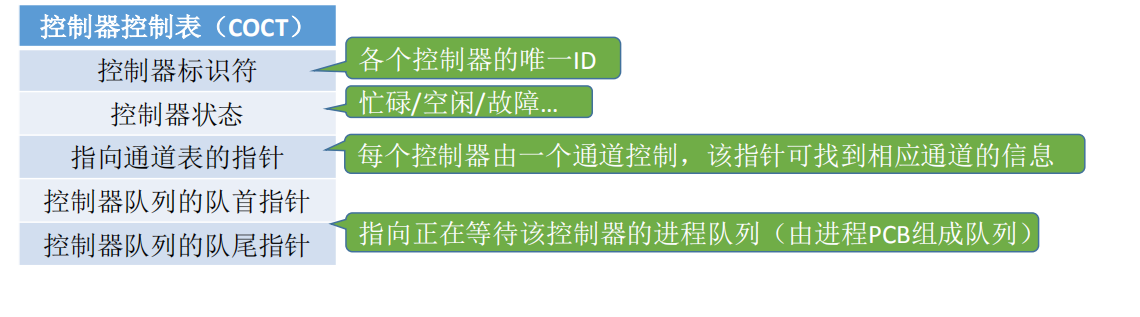
控制器控制表(COCT):每个设备控制器都会对应一张COCT。操作系统根据COCT的信息对控制器进行操作和管理。
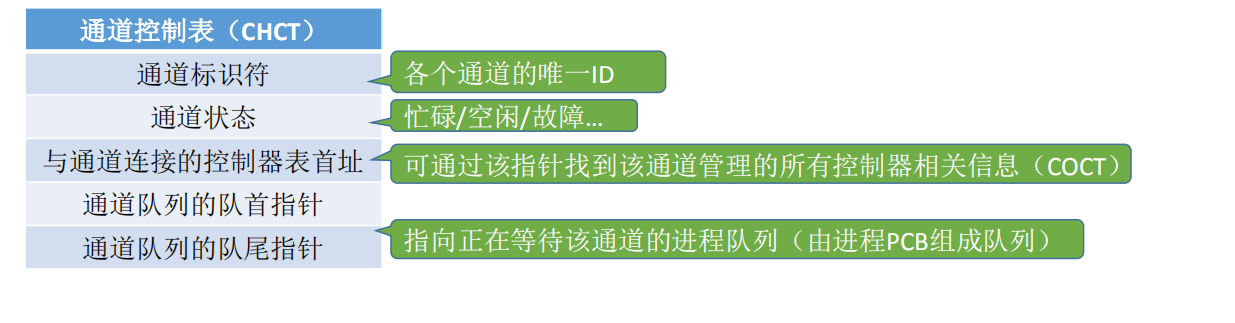
通道控制表(CHCT):每个通道都会对应一张CHCT。操作系统根据CHCT的信息对通道进行操作和管理。
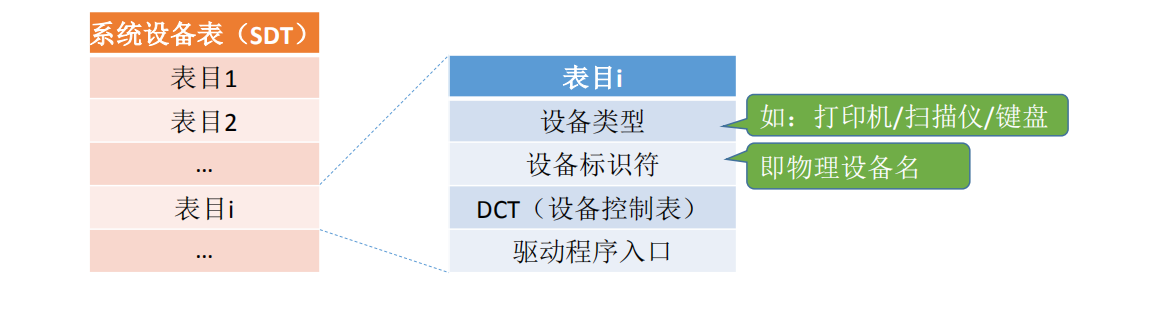
系统设备表(SDT):记录了系统中全部设备的情况,每个设备对应一个表目。
设备分配的步骤:
- 根据进程请求的物理设备名查找SDT(注:物理设备名是进程请求分配设备时提供的参数)
- 根据SDT找到DCT,若设备忙碌则将进程PCB挂到设备等待队列中,不忙碌则将设备分配给进程。
- 根据DCT找到COCT,若控制器忙碌则将进程PCB挂到控制器等待队列中,不忙碌则将控制器分配给进程。
- 根据COCT找到CHCT,若通道忙碌则将进程PCB挂到通道等待队列中,不忙碌则将通道分配给进程。
- 注:只有设备、控制器、通道三者都分配成功时,这次设备分配才算成功,之后便可启动I/O设备进行数据传送
缺点:
用户编程时必须使用“物理设备名”,底层细节对用户不透 明,不方便编程
若换了一个物理设备,则程序无法运行
若进程请求的物理设备正在忙碌,则即使系统中还有同类型的设备,进程也必须阻塞等待
改进方法:建立逻辑设备名与物理设备名的映射机制,用户编程时只需提供逻辑设备名
逻辑设备表(LUT)建立了逻辑设备名与物理设备名之间的映射关系。某用户进程第一次使用设备时使用逻辑设备名向操作系统发出请求,操作系统根据用户进程指定的设备类型(逻辑设备名)查找系统设备表,找到一个空闲设备分配给进程,并在LUT中增加相应表项。 如果之后用户进程再次通过相同的逻辑设备名请求使用设备,则操作系统通过LUT表即可知道用户进程实际要使用的是哪个物理设备了,并且也能知道该设备的驱动程序入口地址。
逻辑设备表的设置问题: 整个系统只有一张LUT:各用户所用的逻辑设备名不允许重复,适用于单用户操作系统每个用户一张LUT:不同用户的逻辑设备名可重复,适用于多用户操作系统
小结:
5.7、缓冲区管理
缓冲区是一个存储区域,可以由专门的硬件寄存器组成,也可利用内存作为缓冲区。
使用硬件作为缓冲区的成本较高,容量也较小,一般仅用在对速度要求非常高的场合(如存储器管理中所用的联想寄存器,由于对页表的访问频率极高,因此使用速度很快的联想寄存器来存放页表项的副本)
一般情况下,更多的是利用内存作为缓冲区,“设备独立性软件”的缓冲区管理就是要组织管理好这些缓冲区
缓冲区的作用:
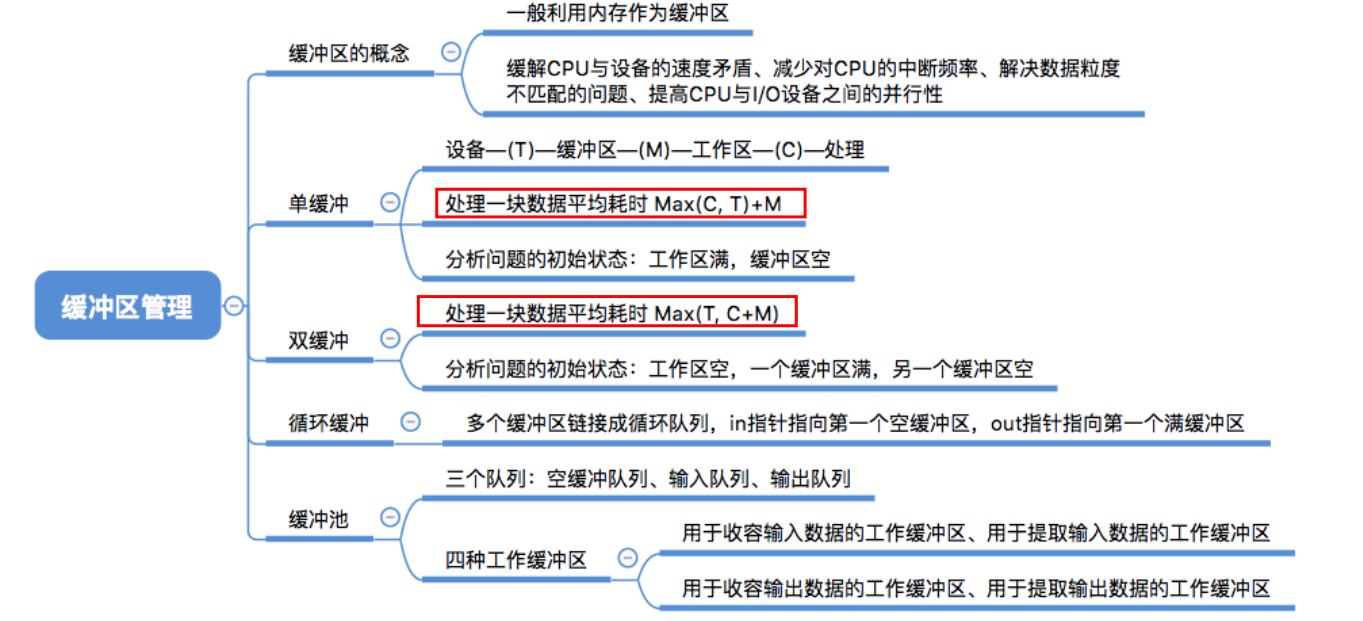
- 缓和CPU与I/O设备之间的速度不匹配的矛盾
- 减少对CPU的中断频率,放款对CPU中断响应时间的限制
- 减少数据粒度不匹配的问题
- 提高CPU与I/O设备之间的并行性
5.7.1、单缓冲
注意:当缓冲区数据非空时,不能往缓冲区冲入数据,只能从缓冲区把数据传出;当缓冲区为空时,可以往缓冲区冲入数据,但必须把缓冲区充满以后,才能从缓冲区把数据传出。
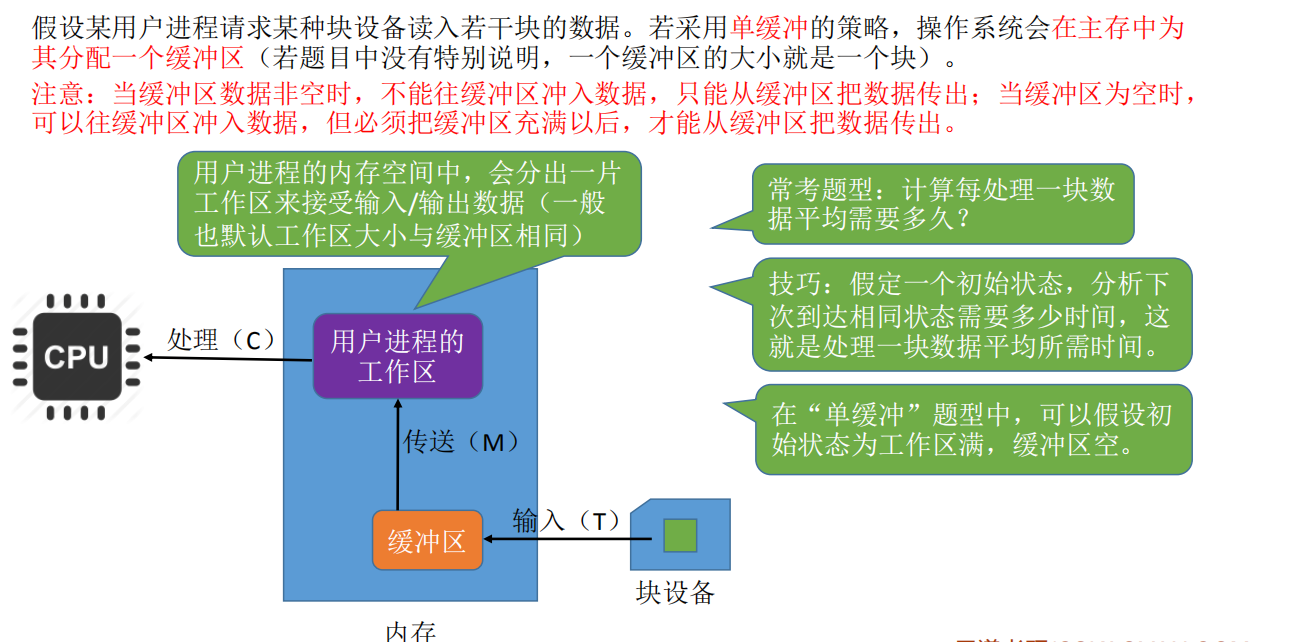
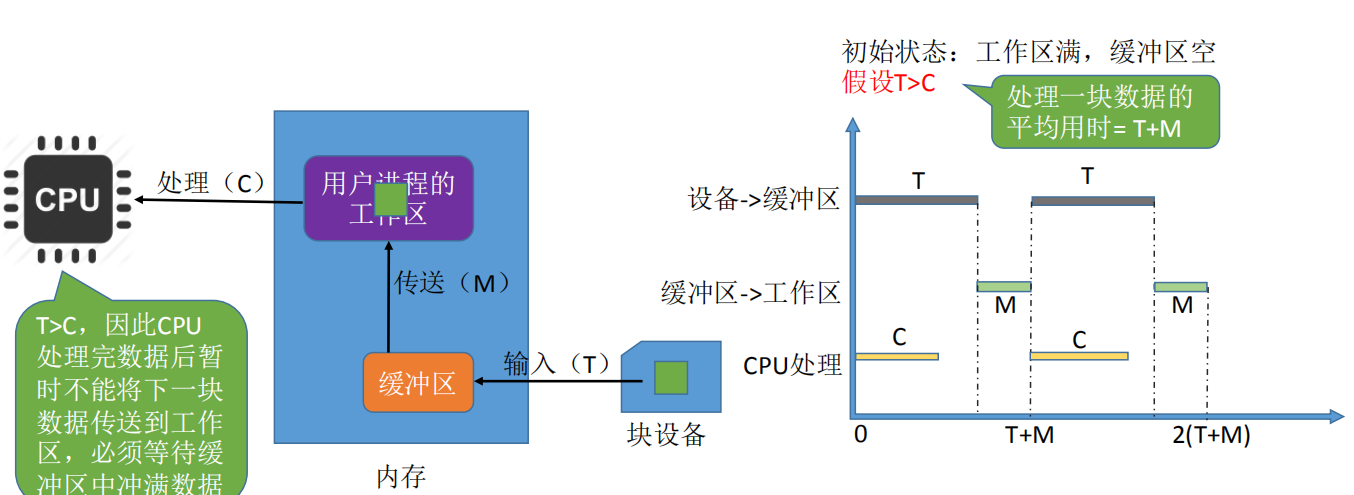
结论:采用单缓冲策略,处理一块数据平均耗时 Max(C, T)+M
5.7.2、双缓冲
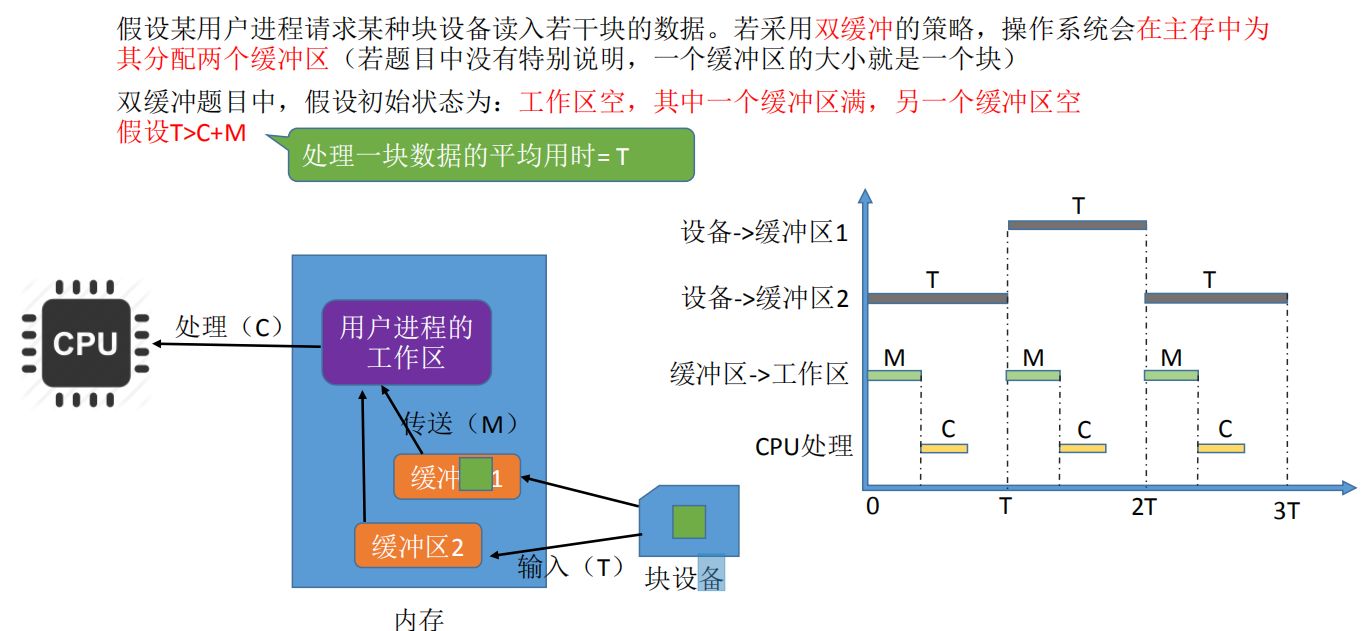
结论:采用双缓冲策略,处理一个数据块的平均耗时为 Max (T, C+M)
使用单/双缓冲在通信时的区别:
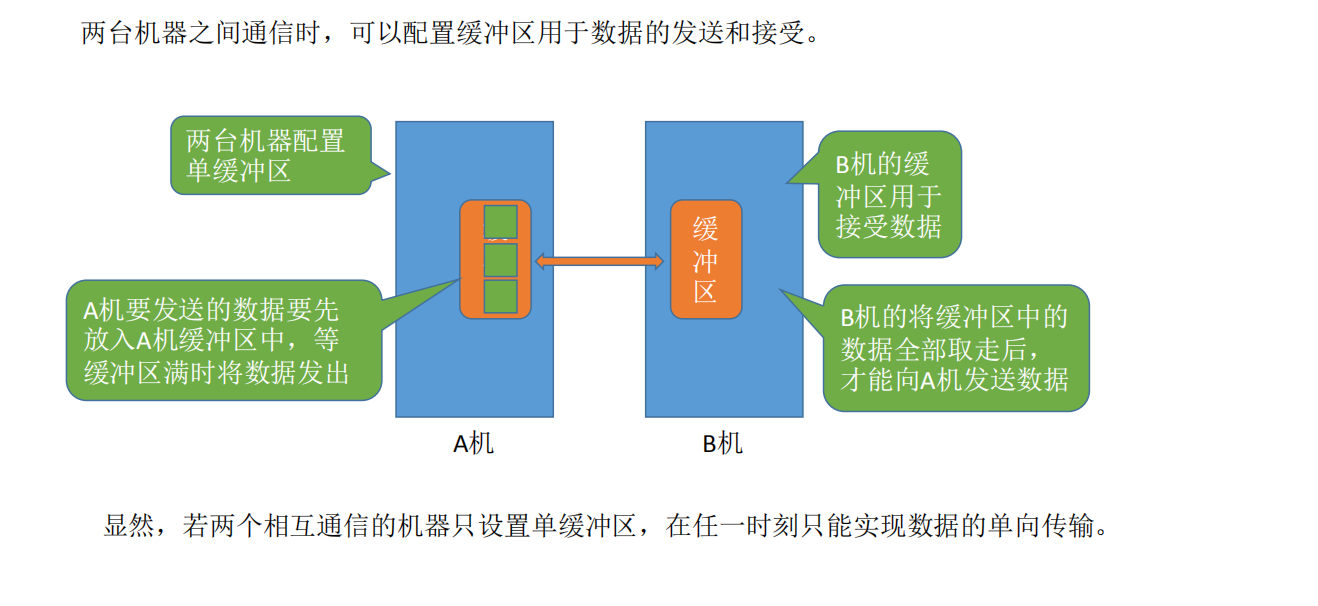
注:管道通信中的“管道”其实就是缓冲区。要实现数据的双向传输,必须设置两个管道
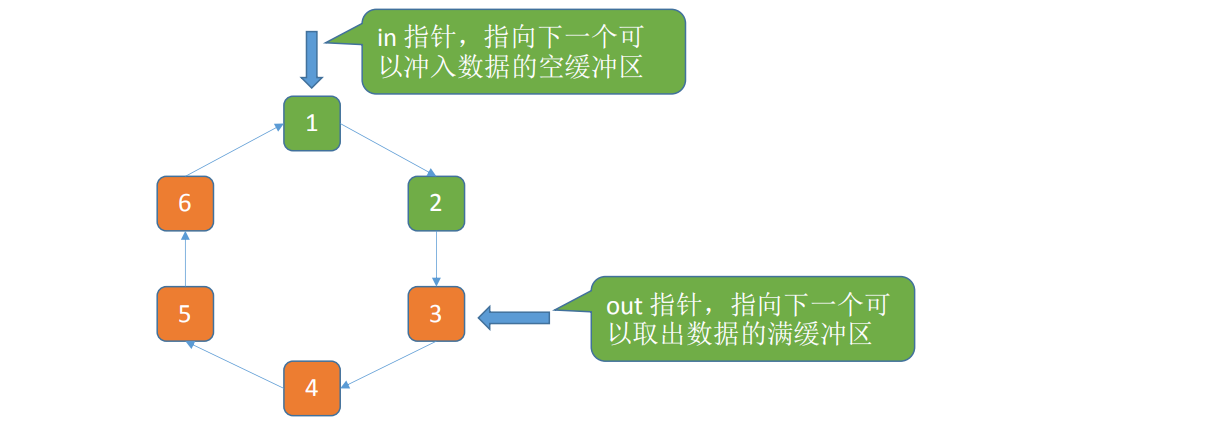
5.7.3、循环缓冲
将多个大小相等的缓冲区链接成一个循环队列。
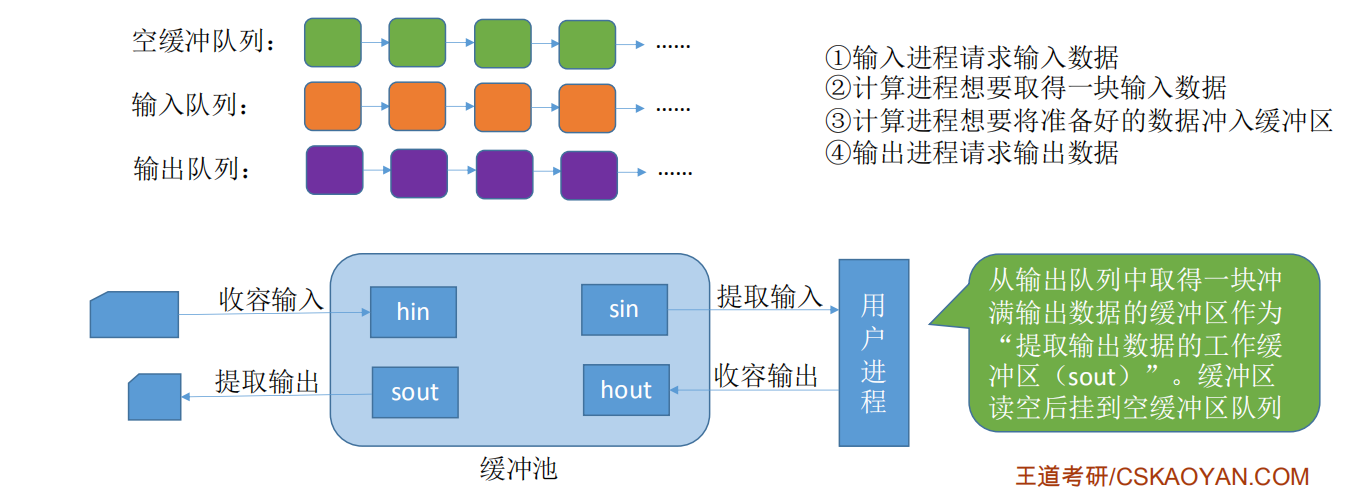
5.7.4、缓冲池
缓冲池由系统中共用的缓冲区组成。这些缓冲区按使用状况可以分为:空缓冲队列、装满输入数据的缓冲队列(输入队列)、装满输出数据的缓冲队列(输出队列)。另外,根据一个缓冲区在实际运算中扮演的功能不同,又设置了四种工作缓冲区:用于收容输入数据的工作缓冲区(hin)、用于提取输入数据的工作缓冲区(sin)、用于收容输出数据的工作缓冲区(hout)、用于提取输出数据的工作缓冲区(sout)
总结:
完结撒花~~
-------------本文结束感谢您的阅读-------------
本文链接: http://example.com/2020/11/05/%E6%93%8D%E4%BD%9C%E7%B3%BB%E7%BB%9F%EF%BC%88%E4%B8%89%EF%BC%89/
版权声明: 本作品采用 知识共享署名-非商业性使用-相同方式共享 4.0 国际许可协议 进行许可。转载请注明出处!


